


کنترل سرعت موتورهای القائی و کاربردهای آن
امروزه با توجه به رشد فزاینده بحث اتوماسیون، استفاده از تجهیزات الکتریکی بر پایه مبدل های الکترونیک قدرت در حال افزایش است. این تجهیزات باعث بهبود عملکرد سیستمها شده اند و بسیاری از پروسه های صنعتی را آسان نموده اند.
در مقالات قبل با مشکلات موتورهای القائی و نحوه راه اندازی آنها آشنا شدید. در برخی کاربری ها نیاز است که سرعت موتور القائی کنترل شود و یا با توجه به نیاز کاربر تغییر کند. در چنین شرایطی امکان استفاده است مدارات رایج وجود ندارد. در این حالت کاربر باید از داریوهای کنترل سرعت استفاده نماید. در این تجهیزات یکی از عواملی که سرعت موتور را تحت تاثیر قرار میدهد فرکانس است و این تغییرات باید به شکلی به وجود آید که با ولتاژ اعمالی هماهنگ بوده و باعث مشکلات در عملکرد الکترموتور نشود.
یکی از کاربردی ترین کنترل دور های AC درایو های VFD می باشد و با تغییر نسبت ولتاژ به فرکانس (V/F) ورودی باعث تغییر سرعت سرعت و یا گشتاور الکتروموتورها می شود این روش علاوه به این که باعث کنترل الکتروموتور می شود و برای اپراتور کنترل راحت را فراهم می کند باعث افزایش بهره وری و صرفه جویی در انرژی می شود که در صنایع مختلف بسیار حائز اهمیت می باشد.
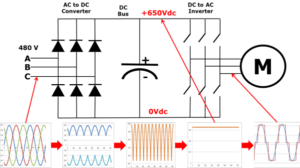
امروزه بیشتر کنترل دور های از مدولاسیون پهنای پالس (PWM) به منظور ایجاد ولتاژ خروجی، جریان و فرکانس متغییر بهره می برد، که یک درایو سرعت متغییر شامل یکسو کننده و اینورتر می باشد. درایوها گزینه مناسبی برای اصلاح سرعت اند چون به اپراتور این امکان را می دهد که سرعت موتور را بر روی یک مقدار ثابت تنظیم نماید و باعث کاهش هزینه انرژی مصرفی و تعمیر و نگهداری تجهیزات شود.
درایوهای ولتاژ متغیر- فرکانس متغیر(V/F) به طرز وسیعی برای سال های بسیاری استفاده می شود. تاکنون تکنیک های PWM مختلفی بیان شده است و PWM سینوسی (SPWM) امروزه مورد استفاده قرار می گیرد. پیاده سازی آنالوگ توسط مقایسه یک موج حامل مثلثی و سیگنال مرجع موج سینوسی تفهیم می شود. دامنه ی مولفه اصلی ولتاژ خروجی با استفاده از تغییر شاخص مدولاسیون تغییر می کند که مقداری بین 0 تا 1 است. دیدگاه متفاوت مدولاسیون PWM بر اساس بردار فضایی با بیان ولتاژ اینورتر و ولتاژ مرجع است. یکی از مهمترین محاسن مدولاسیون سینوسی تولیدی در بردار فضا تعداد کمتر تغییرات حالت کلیدزنی اینورتر و شاخص بالای مدولاسیون آن در مقایسه با روش سه فاز سینوسی PWM است.
در حال حاضر فرکانس کلیدزنی 20kHz برای IGBT قابل دستیابی است اما با توجه به برخی محدودیت های موجود در اینورترها فرکانس کلیدزنی معمولا 12kHz در نظر گرفته میشود. از سوی دیگر مدولاسیون SPWM و مدولاسیون PWM بردار فضایی میتوانند با استفاده از یک میکروکنترلر ارزان به سادگی ایجاد شود و هارمونیک های ورودی به موتور را به حداقل برساند. متاسفانه در بسیاری از درایوهای موجود در بازار این موضوع رعایت نمی شود و خروجی داریوها کاملا به صورت مربعی است که باعث گرم شدن و آسیب دیدن عایق های موتور میشود. مدار کلی یک درایو به صورت شکل زیر است:
در مقالات بعد درباره کنترل درایو و کاربری های آن صحبت خواهد شد.
{kind=link}
بدون دیدگاه