
در بخش اول این مقاله در مورد متود کنترلی ولتاژ بر فرکانس صحبت کردیم و روش کار این متود کنترلی را مورد بررسی قرار دادیم اما در بخش دوم این مقاله متود کنترلی وکتور را مورد بررسی قرار خواهیم داد. همانطور که در مقاله قبلی گفتیم روش کنترل وکتور دارای دو حالت حلقه باز و حلقه بسته است که به ترتیب به معرفی هر کدام میپردازیم:
روش کنترل وکتور حلقه باز
کنترل برداری حلقه باز، که گاهی اوقات کنترل برداری بدون حسگر نامیده میشود، کاملاً با روش کنترل V/f متفاوت است. همانطور که از نام آن مشخص است، کلمه “حلقه باز” به این معنی است که از هیچ انکودری استفاده نمیشود. هدف بزرگ روش کنترل وکتور دستیابی به کنترل بیشتر و پویاتر موتور است. کنترل برداری برای دستیابی به کنترل مستقل سرعت موتور و گشتاور موتور، مشابه نحوه کنترل موتور DC استفاده میکند. هنگام اجرای کنترل برداری، موتور میتواند 200٪ گشتاور نامی را از فرکانس 0.3 هرتز تولید کند.
گشتاور راه اندازی بالاتر در سرعت های پایین تر، را برای کاربردهای مختلف در اختیار ما قرار میدهد. این روش کنترل همچنین امکان تنظیم محدودیت های گشتاور را فراهم میکند. محدودیتهای گشتاور عمدتاً برای محدود کردن گشتاور موتور برای جلوگیری از آسیب به تجهیزات، ماشینآلات یا محصول استفاده میشوند. محدودیت گشتاور به چهار ربع مختلف تقسیم میشود که بستگی به جهت حرکت موتور (به جلو یا معکوس) و اینکه موتور در حال حرکت است یا نه دارد.
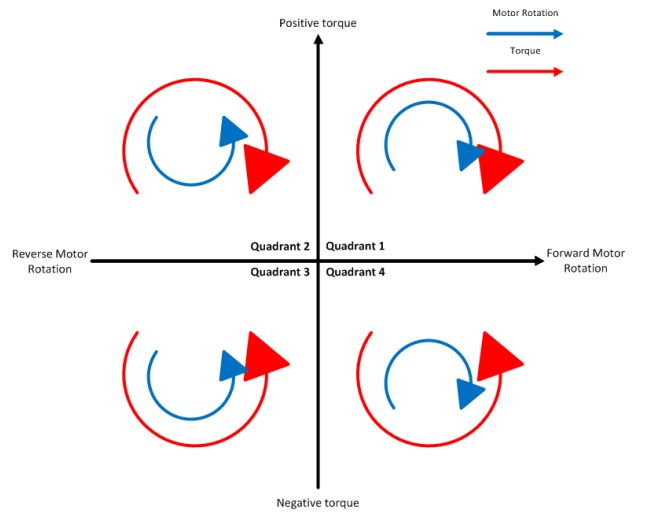
برای جلوگیری از گشتاور بیش از حد به تنظیم حد گشتاور برای ربع 1 نیاز دارد. به همین ترتیب، در یک برنامه که چرخش موتور به سمت راست برای تغذیه خط است اما یک حد گشتاور منفی به دلیل اصلاح کشش ناشی از کشیده شدن خط است. این برنامه به یک محدوده گشتاور تعیین شده در ربع 4 نیاز دارد.
علاوه بر محدودیت های گشتاور، روش کنترل وکتور دارای پاسخ سرعت بالاتر از 10 هرتز است که امکان پاسخ دینامیکی بیشتری به بارهای ضربهای را فراهم میکند. مثالی از کاربردهایی که میتوانند بارهای ضربهای داشته باشند، سنگ شکن است. بار به طور مداوم بسته به اندازه و کمیت سنگ هایی که از طریق سنگ شکن وارد میشوند در حال تغییر است.
ویژگی منحصربفرد کنترل وکتور
چیزی که کنترل برداری را خاص میکند و امکان عملکرد بالا را فراهم میکند این است که درایو چگونه ولتاژ خروجی موتور را تعیین میکند. کتابها، پایاننامهها، دورهها، و انواع دیگر تحقیقات و مستندات برای توضیح کنترل برداری در طول سالها تولید شدهاند. این مقاله فقط به ابتدایی ترین مفاهیم کنترل برداری میپردازد. به جای یک الگوی ثابت ولتاژ بر فرکانس، کنترل برداری از یک الگوریتم برداری برای یافتن بهترین ولتاژ خروجی لازم برای راه اندازی موتور استفاده میکند. روش کنترل وکتور این کار را با استفاده از فیدبک جریان از موتور انجام میدهد. ریاضیات بردار پایه با شکستن جریان مغناطیسی موتورها و گشتاور تولید جریان به بردارها استفاده میشود.
از آنجایی که این روش کنترل به شدت به دینامیک موتور بستگی دارد، برخی از انواع تنظیم خودکار موتور باید انجام شود تا اطمینان حاصل شود که درایو تا حد امکان دادههای موتور را دارد.
پس از تنظیم خودکار (Auto-tuning) درایو برای موتور متصل به آن، کنترل برداری اکنون امکان پذیر است. با کمک دادهها یا پارامترهای موتور قابل اعتماد، درایو اکنون می تواند جریان مغناطیسی (Id) و جریان تولید کننده گشتاور (Iq) را محاسبه کند. این مقادیر برداری هستند. برای حداکثر بازده و گشتاور، درایو باید این دو بردار را در 90 درجه جدا نگه دارد.
به طور کلی، مشخصات کنترل دقیق تر با استفاده از یک الگوریتم برداری برای این روش کنترل نتیجه می شود. تنظیم سرعت +/- 0.2٪ از حداکثر فرکانس است. محدوده کنترل سرعت به 1:200 میپرد و امکان عملکرد با سرعت پایین را بدون کاهش تولید گشتاور فراهم میکند.
روش کنترل وکتور حلقه بسته
آخرین روش کنترلی که در مورد آن صحبت خواهیم کرد نیز بالاترین عملکرد را دارد. روش کنترل وکتور حلقه بسته از یک الگوریتم برداری برای تعیین ولتاژ خروجی درست مانند روش حلقه باز استفاده میکند. تفاوت اصلی این است که اکنون یک انکودر گنجانده شده است. فیدبک انکودر جفت شده با روش کنترل برداری امکان گشتاور راه اندازی 200% موتور در سرعت صفر دور در دقیقه را فراهم میکند. این ویژگی مهم برای برنامه هایی است که نیاز به نگه داشتن بار و عدم حرکت دارند. کاربردها می تواند شامل آسانسور، جرثقیل و بالابر باشد.
سیگنال فیدبک انکودر به بالاترین سرعت پاسخ، بیش از 50 هرتز، و همچنین محدوده کنترل بالاترین سرعت 1:1500 اجازه می دهد. روش کنترل وکتور حلقه بسته علاوه بر این مشخصات عملیاتی با کارایی بالا، قابلیت راه اندازی موتور در حالت کنترل گشتاور را نیز دارد. حالت کنترل گشتاور به درایو اجازه می دهد تا به جای سرعت موتور، گشتاور موتور را مستقیماً کنترل کند. این برای هر کاربردی که در آن گشتاور بر سرعت اولویت دارد، ضروری است.
تخمین زده می شود که موتورها حداقل 50 درصد از کل مصرف انرژی ایالات متحده را تشکیل می دهند. انتخاب روش کنترل مناسب برای یک برنامه کاربردی به موتور اجازه میدهد تا در عین به حداکثر رساندن تولید گشتاور و عملکرد کلی به بهترین شکل کار کند. یک موتور کارآمدتر منجر به مصرف انرژی کمتر، خرابی برنامه کمتر و صرفه جویی کلی بیشتر می شود.
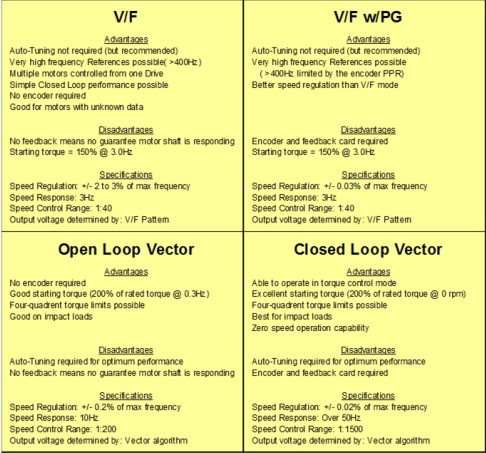
جدول زیر مزایا، معایب و مشخصات هر متود کنترلی را به صورت خلاصه نمایش میدهد.

){kind=link}
بدون دیدگاه