
وقتی یک کارشناس فروش درایو بخواهد درایوش را به شما معرفی کند، دیر یا زود در مورد “کنترل برداری” خواهید شنید. کنترل برداری منجر به کنترل دقیقتر در موتورهای القایی میشود و یک قابلیت لازم و واجب برای کنترل موتورهای آهنربا دائم PM است. خب، کنترل برداری چیست و چرا خوب است؟
کاربرد متد V/f در درایوها
بیایید به اصول اولیه برگردیم. میدانیم که می توان سرعت موتور را با تغییر فرکانس اعمالی به آن کاهش داد. همچنین میدانیم که شار (عامل ایجاد گشتاور) وابسته به ولتاژ اعمالی است که جریان مغناطیسکنندگی را در استاتور ایجاد می کند. حال یک درایو با متد V/F قدیمی، برای حفظ شار بهینه در موتور، یک رابطه خطی بین ولتاژ و فرکانس برقرار می کند؛ یعنی با کاهش فرکانس از مقدار نامی، ولتاژ هم به همان نسبت کاهش می یابد. بنابراین 400V در 50Hz می شود 300V در 37.5Hz و 200V در 25Hz. گاها برای فائق آمدن بر برخی مشکلات گشتاوری و تلفات میتوانیم ولتاژ را در فرکانسهای پایین افزایش دهیم. کنترل ساده ولتاژ به فرکانس (V/f) در شکل زیر به نمایش در آمده است.
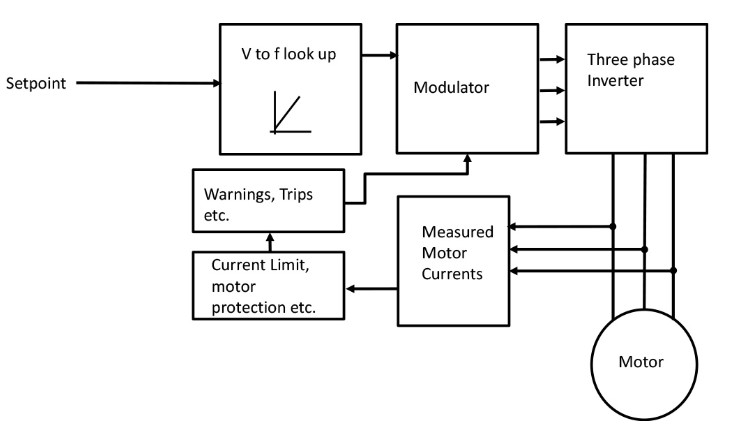
مدولاتور بر اساس ولتاژ و فرکانس مورد نیاز، پالسهای مطلوب برای کنترل IGBT را ایجاد میکند. جریان، برای حفاظت از موتور و درایو با کاهش فرکانس یا تریپ مورد استفاده قرار میگیرد.
هرچند برقراری نسبت V/f همیشه منتج به عملکرد مطلوب نمیشود. خصوصیات موتور با تغییر دما تغییر میکند و حفظ سطوح شار مورد نیاز در مقادیر فرکانسی پایین دشوار است. به همین دلیل سازندگان درایو تلاش میکنند جریان مغناطیس کنندگی را اندازه بگیرند (این جریان، شار را تولید میکند و مقدارش به ولتاژ اعمالی وابسته است) و ولتاژ خروجی را مطابق با آن تنظیم کنند و بدین شکل از برقراری نسبت خطی غیرهوشمندانه بین ولتاژ و فرکانس رهایی پیدا کنند. چنین روشی تا حدودی به حل مشکل کمک میکند، اما برای کنترلی دقیق به خصوص در سرعتهای پایین، جریانهای تولیدکننده شار و گشتاور باید به صورت آنی اندازهگیری و کنترل شوند. بنابراین به دلیل چرخش موتور و ولتاژهای فازی، زاویه و اندازه این جریانها نیز اهمیت پیدا میکند. این یعنی با یک سیستم برداری سر و کار داریم.
روش کنترل شار و گشتاور موتور
بنابراین، حال به جای درایوی که در یک نقطه کار مشخص، ولتاژ و فرکانس مشخصی را تولید میکند، سعی میکنیم شار و گشتاور موتور را مستقیما کنترل کنیم، و این کنترل را دائما تنظیم کنیم تا نقطه کار مورد نظرمان حاصل شود. سیستم کنترلی سادهشده یک درایو با روش کنترل برداری را در شکل زیر مشاهده میکنید.
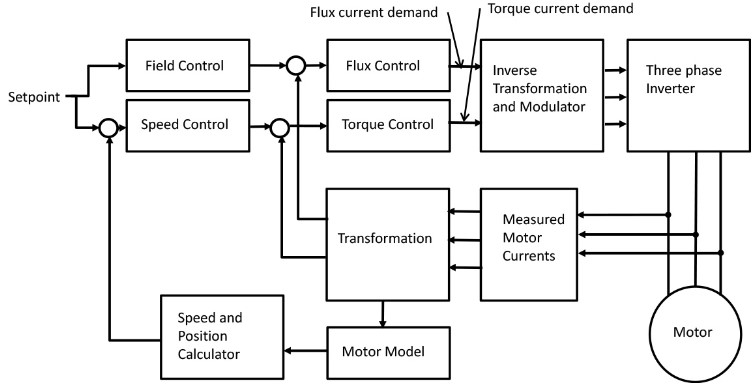
از این شکل میتوانید ببینید که نقطه کار مورد نیاز به یک سرعت و سپس گشتاور مورد نیاز تبدیل میشود و همینطور به میدان و سپس شار مورد نیاز تبدیل میشود که این ها بخشی از سیستم کنترل برداری است.
برای انجام همه این کارها، نیاز به عملیات ریاضی پیچیده و اندازهگیری دقیق جریان وجود دارد. ما همچنین باید خصوصیات موتوری که کنترلش میکنیم را بدانیم.
پیادهسازی ریاضی کنترل برداری
حال میتوانیم عملیات ریاضی مورد نیاز را با استفاده از ریزپردازندههای موجود انجام دهیم. ما همچنین میتوانیم با استفاده از ادوات اثر هال اندازهگیری جریان خروجی را با دقت بالا انجام دهیم. تمام این ویژگیها در گذشته گزینههای گرانی برای درایوها بودند. خوشبختانه امروزه تاثیر قیمتی قابل توجهی روی درایوها ندارند و راحتتر از گذشته در دسترس هستند. با مقایسه شکلهای بالا میتوانید دریابید که کنترل برداری چقدر پیچیدهتر است.
کاربر تنظیمکنندهی درایو، تعیین خصوصیات موتور را انجام میدهد. درواقع درایو، اطلاعات پایهی خود را از تنظیم مقدار صحیح جریان، ولتاژ و ضریب توان موتور در پارامترهای مربوطه، بهدست میآورد. هرچند، اطلاعات اضافی را می توان با اعمال یک تنظیم خودکار Autotune به دست آورد، و اکثر درایوهای دارای کنترل برداری از کاربر میخواهند در صورت استفاده از کنترل برداری، فرایند Autotune را انجام دهند. این فرایند باعث میشود درایو به صورت خودکار در چند ثانیه پارامترهای بیشتری همچون اندوکتانس اولیه، مقاومت استاتور را اندازهگیری کند که به ساخت مدلی دقیق از موتور و در نتیجه، آسانتر کردن کنترل برداری کمک شایانی میکند.
پارامترهای مهم در کنترل برداری درایو
برخی درایوها، تاثیر دمای موتور در عملکرد را نیز در نظر میگیرند (این دما از اطلاعات مربوط به بار و موتور محاسبه میشود). بنابراین اجرای Autotune در حالی که موتور سرد است اهمیت زیادی دارد.
در گذشته، متخصصان برای دستیابی به یک کنترل برداری خوب و مطمئن، استفاده از انکودرها را توصیه میکردند تا سرعت و موقعیت دقیق روتور در اختیار درایو قرار بگیرد. امروزه با با مدلسازی بهتر و سریعتر ریاضیاتی، دیگر نیازی به انکودر نیست. هرچند، در برخی کاربردها همچون آسانسورها و جرثقیلها استفاده از انکودرها همچنان متداولتر است. اگر انکودر وجود نداشته باشد، درایو از مدل موتور برای محاسبه سرعت و موقعیت روتور بهره میبرد.
حالا دیگر درایو سرعت موتور را با تنظیم مستقیم فرکانس کنترل نمیکند (مانند کنترل V/f)، بلکه این کار را با کنترل گشتاور و شار موتور انجام میدهد. بنابرین حالا نقطه سرعت مورد نظری که کاربر وارد میکند، به یک گشتاور و شار مورد نیاز تبدیل میشود که در شکل دوم آن را میبینید. به عبارت دیگر درایو میگوید: بر اساس دانش موجود از موتور، به چقدر گشتاور و شار مغناطیسی نیاز داریم تا سرعت موتور را روی مقدار مورد نیاز حفظ یا تنظیم کنیم؟
مزایای کنترل شار و گشتاور در مقایسه با روش V/f
از آنجا که درایو گشتاور و شار را مستقیما کنترل میکند، عملکرد درایو نسبت به روش سنتی V/f بهبود مییابد. درایو به تغییرات ناگهانی بار واکنش بهتری میدهد و بازدهیاش بالاتر میرود. بعلاوه، راحتتر میتواند انواع موتور همچون موتورهای آهنربا دائم PM و سنکرون رلوکتانس را کنترل کند. تنظیم سرعت بسیار بهتر است و جبران لغزش نیز به صورت خودکار صورت میگیرد.
کنترل برداری مزایای مختلفی همچون حفظ بهتر سرعت، پاسخ بهتر به تغییر ناگهانی بار و گشتاور بسیار بهتر در سرعتهای پایین دارد. موتورها نیز با بازدهی بالاتری کار میکنند و در نتیجه دمای کاریشان پایینتر می آید.
عملکرد بهتر با کنترل حلقه بسته PID
در شکل دوم مشاهده میکنید که جریان خروجی در درایو پایش میشود و به المانهای تولید کنند شار و گشتاور تقسیم میشود. این مقادیر اندازهگیری شده به کنترلرهای گشتاور و شار بازخورد داده میشوند بنابراین ما کنترل حلقه بسته این مقادیر را در یک سیستم کنترلی کامل با نقاط جمعکننده و بهرههای کنترلی داریم که دقیقا مثل یک سیستم کنترلی حلقه بسته PID کار میکند.
از آنجا که جریانها سه فاز اندازهگیری میشوند، این مقادیر باید به یک جریان واحد شار (جریان مغناطیس کنندگی) و یک جریان گشتاور (بار) تبدیل و تقسیمبندی شود. این تبدیلهای ریاضیاتی همچنین برای تبدیل مجدد جریانهای مورد نیاز شار و گشتاور به جریان سه فاز و سپس تبدیل به سیگنالهای مدولاسیون که به بخش قدرت درایو فرمان میدهند مورد استفاده قرار میگیرند.
همچنین باید در نظر بگیرید که سرعت تخمینی (محاسبه با کمک جریانهای شار و گشتاور و مدل موتور) در یک حلقه بسته سوم بازخورد گرفته میشوند که این حلقه برای کنترل سرعت موتور مورد استفاده قرار میگیرد.
بااینحساب، سیستم کنترل برداری از اندازهگیریها و محاسبات زیاد و سه کنترل حلقه استفاده میکند. در روزهای ابتدایی پیدایش کنترل برداری، پایدار کردن این سیستم و بهرهبرداری و تنظیم برخی درایوها به خصوص بدون انکودر کاری دشوار بود. امروزه، درک بهتر مدلهای موتور کنترل برداری را سادهتر و قابل اطمینانتر کرده است.
کدام درایوها بهترین روش کنترل برداری را ارائه میکنند؟
اینورتک همواره در ارائه کنترل برداری ساده و موثر با تنظیمات ساده پیشرو بوده است. درایو P2 ویژگیهای کنترل برداری کاملی همچون کنترل گشتاور و گشتاور سرعت پایین عالی را به ارمغان میآورد. درایو E3 نیز کنترل برداری سادهای برای بهبود عملکرد در اختیار میگذارد.
با هر درایوی، تنظیم پارامترهای صحیح موتور و پیروی دقیق از فرایند تنظیم اهمیت بالایی دارد. این مساله به خصوص در کار با موتورهای آهنربا دائم و سنکرون رلوکتانس اهمیت بالایی دارد. البته جای نگرانی نیست، ما در لیان الکتریک اینجاییم تا به شما کمک کنیم!

{kind=link}
بدون دیدگاه