
تا به حال چندین بار اشاره کرده ایم که کنترل حلقه بسته برای ثابت نگه داشتن دما، فشار، فلو و غیره مورد استفاده قرار می گیرد. درایوهای اینورتک این ویژگی را به صورت پیش فرض روی خود دارا هستند، بنابرین به تعداد تجهیزات خارجی بسیار کمی نیاز است. بیایید این ویژگی را با جزئیات بیشتری بررسی کنیم.

هزاران درایو و موتور وظیفه جابجایی چمدان ها در فرودگاه ها را بر عهده دارند.
کنترل حلقه PID
در ابتدا باید در مورد تفاوت میان کنترل حلقه باز و حلقه بسته صحبت کنیم. اگر ما پمپی داشته باشیم که بخواهیم در خروجی اش فشار آب ثابتی را به ما بدهد، می توانیم سرعت درایو روی آن را به صورت دستی روی مقدار ثابتی قرار دهیم و امیدوار باشیم که فشار در تمامی اوقات روی مدار ثابت بماند، و شب ها هم می توانیم کمی سرعت درایو را کم کنیم. این کنترل حلقه باز است.
راه حل بهتر بکارگیری یک سنسور فشار و اتصال سیگنال آن به درایو است. درایو حالا مقدار واقعی فشار را با مقدار مطلوب (نقطه مرجع مورد نظر) مقایسه می کند و سرعت پمپ را دائما تغییر می دهد تا فشار را در مقدار ثابتی نگه دارد. از آنجا که اتصال سنسور فشار یک حلقه تشکیل می دهد (درایو-موتور-پمپ-سنسور-درایو) این سیستم ها به سیستم های کنترلی حلقه بسته شهرت دارند. شکل زیر یک نمونه از این گونه سیستم ها را نشان می دهد.
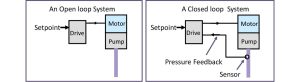
سیستم های کنترلی حلقه PID و حلقه باز
کنترل حلقه بسته کاربردهای بسیاری دارد، از سیستم های پایدارساز هواپیما گرفته تا کنترل تنش در سیستم های سیم پیچی، و همچنین کاربردهای ساده تری همچون تثبیت فشار، فلو، سرعت یا دما.
پایداری کنترل حلقه PID
یک مساله اساسی در کنترل حلقه PID، پایداری است. در این سیستم با پردازش دقیق خطا می توان پایداری را ایجاد کرد. خطا اتلاف بین نقطه مرجع و مقدار واقعی سیگنال فیدبک یا اندازه گیری است. خطا به سیستم کنترلی که در اینجا همان درایو منتقل می شود. درایو باید بتواند با پردازش سریع خطای موجود را پایش، پردازش و برطرف کند.
در یک کاربرد رایج از درایوها برای سیستم پمپاژ، نقطه مرجع (فشار مورد نظر) را می توان با استفاده از یک ورودی آنالوگ یا مقدار ثابت تنظیم کرد و مقدار واقعی نیز با یک ترنس دوسر فشار که که به دیگر ورودی آنالوگ درایو متصل می شود، تعیین می گردد. خطا سپس دائما سرعت موتور را تغییر می دهد. حال برای این که کنترل خوبی داشته باشیم و همچنین سیستم پایدار بماند، سیگنال خطا باید پردازش شود.
درایو با استفاده از بهره های تناسبی P و انتگرالی I سیگنال خطا را بهبود می بخشد. مقدار دیفرانسیلی D خطا به ندرت مورد استفاده قرار می گیرد، اما سه عبارت تناسبی P، انتگرالی I و دیفرانسیلی D منتج به یه نام خلاصه برای سیستم های کنتل حلقه بسته شده اند: سیستم PID. در نتیجه با تنظیم مقادیر P، I و D می توان هر سیستم حلقه PID را پایدار کرد. شکل زیر نحوه پردازش خطا در یک سیستم PID نوعی را نشان می دهد.
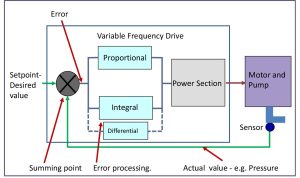
پردازش خطا در سیستم PID
پیاده سازی PID با درایو Invertek
برای پیاده سازی این سیستم با درایو کنترل دور اینورتک باید چه کنیم؟ کنترلر PID به صورت پیش فرض روی همه درایو های اینورتک موجود است. بنابراین تنها نیاز به یک سنسور یا سیگنال فیدبک داریم. مثل همه کارهای مهندسی، اگر اساس کار درست باشد، بقیه کار آسان خواهد بود. مطمئن شوید که سیگنال فیدبک از ترنس دوسر مقادیر درستی را برای شما نمایش می دهد و با تغییر سرعت موتور تغییرات سیگنال فیدبک نیز متناسب است. برای بررسی این موضوع ابتدا باید درایو را در حالت حلقه باز روشن کنید.
وقتی که از کارکرد درست سیگنال ترنس دوسر اطمینان حاصل کردید می توانید کنترل حلقه PID را فعال کنید و ببینید چه اتفاقی می افتد (P12=5). به احتمال زیاد سیستم پایدار می ماند و درست عمل می کند و نیازی به تنظیمات بیشتر ندارد. اما اگر به اندازه کافی پایدار نبود، می توانید پارامترهای P و I را تغییر دهید، همانطور که بیان شد معمولا نیازی به تغییر مقدار پارامتر D نیست.
کنترل حلقه PID غالبا برای کاربردهایی همچون کنترل دما، فلو یا فشار مورد استفاده قرار می گیرد. اما کاربردهای بسیار دیگری نیز وجود دارند، مثل حفظ تنش در یک سیستم سیم پیچی یا رولینگ الیاف، که شکل زیر آن را نمایش می دهد. بازوی لغزنده یک پتانسیومتر را به حرکت در می آورد و پتانسیومتر نیز سیگنال را به درایو ارسال می کند. بدین ترتیب درایو میزان تنش روی ماده در حال پیچش را بدست می آورد. بدین شکل درایو می تواند سرعت خود را به گونه ای تنظیم کند که تنش روی ماده یا الیاف ثابت باقی بماند.
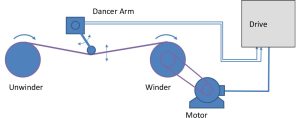
کنترل تنش در یک کاربرد رولینگ
انواع درایو کنترل دور برند Invertek
کنترل حلقه PID را در درایوهای I ،E3 و P با استفاده از پارامترهای P-41 و P-42 تنظیم می کنند. در مدل های P2 و Eco، گروه تنظیماتی شماره 3 مربوطه به تنظیمات ابتدایی و پیشرفته PID است.
در درایوهای Eco و P2 پارامترهای اضافی متعددی وجود دارند که گاها مفید هستند. شیب های سرعت را می توان کم کرد تا سرعت پاسخ بهبود یابد، محدوده های مختلفی را می توان به کاربرد اعمال کرد. اگر اشکالی در سیستم به وجود آید مثل ترکیدگی لوله ها، درایو آن را به صورت هوشمند تشخیص و کار را متوقف می کند. درایو Eco ویژگی های منحصر به فردی همچون کنترل چند پمپه و تکنولوژی اوپتی فلو را نیز در دل خود دارد. این پارامترها ویژگی های عملی هستند تا سیستم حلقه PID منعطف تری داشته باشیم.

بدون دیدگاه