
در مقاله های سیگنال های خروجی درایو کنترل دور و تنظیم پارامترهای اساسی درایو ما چگونگی تنظیم و راه اندازی یک درایو و چگونگی کنترل آن را بررسی کردیم. اکنون ما جزئیات بیشتری را در قسمت تنظیمات و روش های مختلفی که به واسطه آن می توان درایو کنترل دور را به شکل پیشرفته تری تنظیم و بهره برداری کرد را مورد بررسی قرار خواهیم داد.

نقطه مرجع چیست؟
خوب، نقطه مرجع سرعت همان فرکانسی است که می خواهید به موتور اعمال شود. بنابراین ممکن است یک نقطه تنظیم 5Hz ، 25Hz ، 123.4Hz یا هر چیز دیگری شبیه به این باشد. ما اغلب در مورد کنترل سرعت موتور با استفاده از یک درایو کنترل دور صحبت می کنیم، اما تقریباً در همه کاربردها ما تنها فرکانس مورد نیاز موتور را کنترل می کنیم. البته فرکانس مورد نظر ما برای گردش موتور بسته به لغزش موتور کمی تغییر می کند که به نوبه خود به بار نیز بستگی دارد.
البته سرعت موتور نیز به ساختار موتور بستگی خواهد داشت و اگر بخواهیم دقیق تر باشیم به تعداد قطب های موتور وابسته است. وقتی یک فرکانس 25 هرتز توسط درایو به موتور اعمال می شود، یک موتور چهار قطبی با بار کامل در حدود 700 دور در دقیقه می چرخد. یک موتور دو قطبی حدود 1400 دور در دقیقه دور می زند.(ترمزگیری و روش های توقف در درایو کنترل دور)
البته این جمله در تمام زمان ها صادق نیست. حالاتی نیز داریم که درایو کنترل دور 25 هرتز را به موتور تغذیه می کند، اما ممکن است موتور بنا به دلایل مختلف در این سرعت ها کار نکند. شاید هنوز در حال شتاب گیری یا کاهش شتاب باشد، ممکن است درایو به محدودیت جریان مصرفی خود نزدیک شده باشد یا تریپ داده باشد.
اما اگر درایو کنترل دور در حالت کارکرد عادی خود باشد، بیشتر اوقات ما علاقه نداریم سرعت واقعی موتور را بدانیم، ما فقط می خواهیم که نوار نقاله بتواند بسته بندی را با سرعت مناسب جابجا کند یا آب با فشار مناسب به مصرف کننده برسد.ما تمایل داریم که در مورد سرعت و فرکانس به عنوان دو پارامتر جایگزین و هم معنی صحبت کنیم، اگرچه واقعاً اینگونه نیستند.

کنترل سرعت بهینه
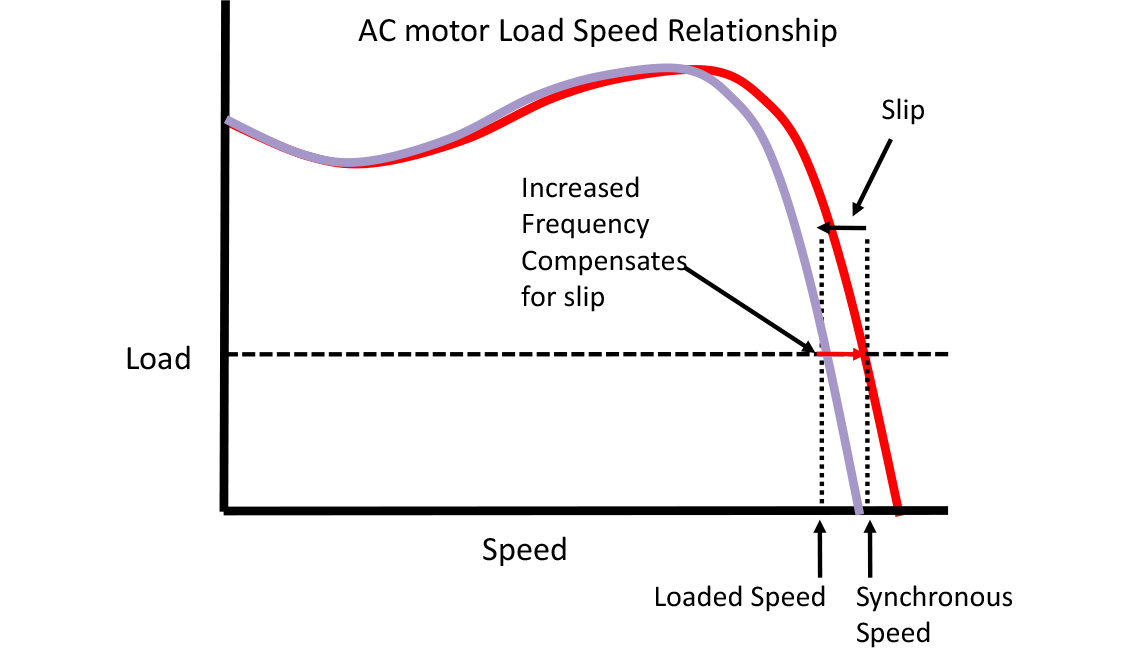
اما اگر می خواهید کنترل سرعت بهتری داشته باشید گزینه های مختلفی وجود دارد. جبران لغزش می تواند بهبود قابل توجهی در کنترل سرعت توسط درایو کنترل دور شما به وجود بیاورد. درایو جریان بار را کنترل می کند، و در حالی که حدس می زند لغزش موتور چه مقدار است (شما هنگام تنظیم پارامترهای موتور اطلاعاتی در رابطه با موتور وارد می کنید که درایو با آستفاده از آن ها می تواند مدل خوبی از موتور را برای خود تجسم کند)، بنابراین می تواند فرکانس خروجی را کمی جبران کند. این عملکرد را می توانید درتصویر ذیل مشاهده کنید.
کنترل برداری این کار را بهتر انجام می دهد. با الگوبرداری از موقعیت و سرعت موتور، درایو کنترل دور می داند موتور چه کار می کند، بنابراین می تواند فرکانس را برای کنترل موتور بر روی سرعت مرجع مورد نظر تنظیم کند و سرعت واقعی موتور را نشان دهد. یعنی وقتی یک درایو با کنترل برداری کار می کند، فرکانس نشان داده شده توسط درایو تقریباً سرعت واقعی موتور است.(انتخاب درایو کنترل دور و سافت استارتر متناسب با پروژه )
با این حال، اگر واقعاً باید بدانید موتور چه کاری انجام می دهد و نیاز دارید که سرعت دقیق آن را کنترل کنید، می توانید از یک انکودر استفاده کنید. انکودر در قسمت پشت موتور تعبیه می شود و یک سری پالس را به درایو کنترل دور ارسال می کند که به آن امکان کنترل دقیق سرعت را می دهد. انکودرها هنگام کار با بالابرها، جرثقیل و آسانسور بسیار مناسب هستند، زیرا می توانید موتور را از سرعت صفر در لحظه آزاد شدن ترمز به خوبی کنترل کنید. درایوهای کنترل دور مدرن نیز با الگوریتم کنترل برداری حلقه باز (بدون انکودر) خود می توانند تا حدود خوبی این کار را با دقت بالا انجام دهند.
تنظیم نقطه مرجع
خوب ، به بحث نقطه مرجع سرعت برگردیم. ساده ترین راه برای تنظیم نقطه مرجع، اعمال یک سیگنال 0 تا 10 ولت بر روی ورودی آنالوگ مناسب روی درایو کنترل دور است. عموما تمامی درایوهای کنترل دور، تغذیه 10 ولت را برای شما فراهم می کنند و شما تنها با اتصال یک پتانسیومتر ساده بین تغذیه 10 ولت و ترمینال ورودی آنالوگ، می توانید یک نقطه مرجع آنالوگ را به درایو کنترل دور اعمال کنید.
اکنون با تنظیم پتانسیومتر، مقدار ولتاژ اعمالی به ترمینال ورودی آنالوگ می تواند بین صفر تا 10 ولت تغییر کند، و نقطه مرجع (به طور پیش فرض) بین 0 و 50 هرتز جابجا خواهد شد. در این وضعیت اگر به درایو کنترل دور دستور حرکت موتور داده شود، بسته به میزان شتاب تنظیم شده فرکانس خروجی از صفر هرتز تا نقطه مرجع سرعت افزایش می دهد.(مقایسه درایو کنترل دور AC و DC)
اما فرض کنید می خواهیم درایو را با یک سیگنال 0 – 20mA یا 4 – 20mA کنترل کنیم؟ باز مشکلی نیست، درایوهای کنترل دور عموما هم سیگنال های ولتاژی و هم جریانی در ورودی آنالوگ خود دریافت می کنند. کافی یک یا دو پارامتر را متناسب با کاربردتان تنظیم کنید.نقطه مرجع لازم نیست حتما از طریق ورودی آنالوگ صورت بگیرد. کنترل کامل را می توان با استفاده از صفحه کلید تعبیه شده روی درایو کنترل دور انجام داد. نقطه مرجع سرعت با استفاده از فلش های “بالا” و “پایین” روی صفحه کلید درایوهای کنترل دور تنظیم می شوند.
در اینجا گزینه های مختلفی وجود دارد که اجازه می دهد درایو کنترل دور با سرعت های مختلف (سرعت قبلی ، سرعت از پیش تعیین شده ، حداقل سرعت و غیره) راه اندازی شود تا تمامی کاربردهای ممکن بهره برداران را پوشش دهد. همچنین می توانید با صفحه کلید تعبیه شده، جهت چرخش موتور را نیز با یک کلید عوض کنید، و البته که می توانید این قابلیت را به طور کلی غیر فعال نیز بکنید.

علاوه بر این ها سرعت های پیش فرضی نیز وجود دارند که کاربر می تواند از قبل آن ها را تنظیم کند و با چند دستور دیجیتال ساده آن ها را فعال کند. همچنین نقطه مرجع سرعت از طریق پروتکل های مخابراتی مثل مودباس قابل تنظیم و تغییر است.(اهمیت تهویه مناسب برای درایو کنترل دور)

{kind=link}
بدون دیدگاه