
در مقاله کمیت هایی که باید بعد از تعمیرات اینورتر تنظیم شوند (بخش اول) چندین پارامتر اساسی برای تنظیم را مورد بررسی قرار دادیم. در این مقاله به بررسی سایر پارامترهای مهم در آن ها می پردازیم.

۱– سرعت های از پیش تنظیم شده در اینورتر
اینورتر علاوه بر نقطه مرجع های سرعتی که از راه های مختلف مثل اتصال پتانسیومتر به ترمینال ورودی آنالوگ و تنظیم سرعت با کیپد دریافت می کند، می تواند چندین سرعت از پیش تنظیم شده را نیز در پارامترهای مربوطه دریافت کند و با تعیین ورودی های دیجیتال به صورت باینری، روی این سرعت ها کار کند. این تجهیزات بسته به پیشرفته بودنشان عموما بین ۴ تا ۱۶ سرعت پریست را دریافت می کنند.( نکات ایمنی که باید هنگام تعمیرات اینورتر رعایت کنیم)
۲– فرکانس تشدید و پهنای باند آن در اینورتر
گاها پیش می آید که موتور و بار در فرکانس خاصی دچار تشدید فرکانسی می شوند و شروع به لرزش می کنند. این لرزش ها ممکن است بسیار شدید باشند و عملا به بار یا فوندانسیون نصب آسیب بزنند. با تعریف فرکانس مورد نظر و تعیین یک باند یا بازه فرکانسی حدودی برای آن، اینورتر به محض رسیدن به فرکانس مذکور از روی آن می پرد و موتور را با فرکانس تشدید به چرخش در نمی آورد. این باعث می شود تشدید دیگر رخ ندهد.
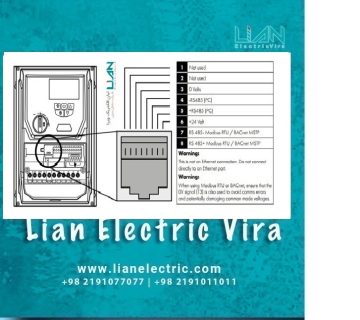
۳– ورودی و خروجی های آنالوگ در اینورتر
ترمینال های آنالوگ می توانند از دو نوع جریانی یا ولتاژی باشند. ترمینال های جریانی معمولا از نوع ۴-۲۰mA هستند و ترمینال های آنالوگ نیز معمولا با سیگنال ۰-۱۰v کار می کنند. تعیین فرمت مناسب کاملا به تجهیزی بستگی دارد که می خواهیم به اینورتر متصل کنیم. این تجهیزات می توانند سنسورها یا plc ها باشند. همچنین شما می توانید مقاله آشنایی با ایرادات اینورتر فرکانس متغیر را مطالعه کنید.
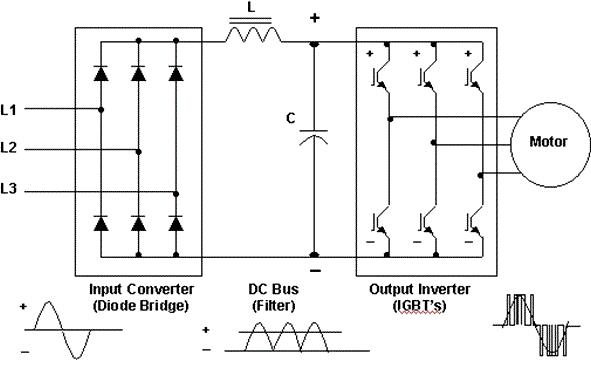
۴ – فرکانس کلیدزنی در اینورتر
فرکانس کلیدزنی تعیین کننده سرعت کلیدزنی IGBTها در خروجی اینورتر می باشد. فرکانس کلیدزنی همان موج های مربعی هستند که شکل موج سینوسی خروجی را می سازند و در نتیجه هرچه سرعت این کلیدزنی ها بیشتر باشد، موج ساخته شده سینوسی تر و نرم تر خواهد بود و موتور با نویز کمتری کار می کند. هر چند توجه به این نکته ضروری است که هر چه سرعت کلیدزنی IGBTها بالاتر باشد، تلفات حرارتی اینورتر نیز افزایش می یابد. مقداری بین ۴ تا ۸ کیلوهرتز معمولا مناسب می باشد.
۵– راه اندازی خودکار در اینورتر
همان طور که می دانید اینورتر دارای توابع حفاظتی مختلفی می باشد که دائما در حال پایش موتور و سیستم می باشد و در صورت تشخیص خطا، اقدام به تریپ می کند و وارد حالت خطا می شود. حال برای به راه افتادن مجدد آن ، کاربر باید آن را ریست کند، اما این همیشه امکان پذیر نیست و ممکن است اینورتر در دسترس کاربر نباشد. با تنظیم پارامتر اتوریست، این تجهیز می تواند به طور خودکار خطاهای خود را ریست کند و مجددا شروع به چرخاندن موتور کند.( اصول تعمیرات اینورتر چیست؟)
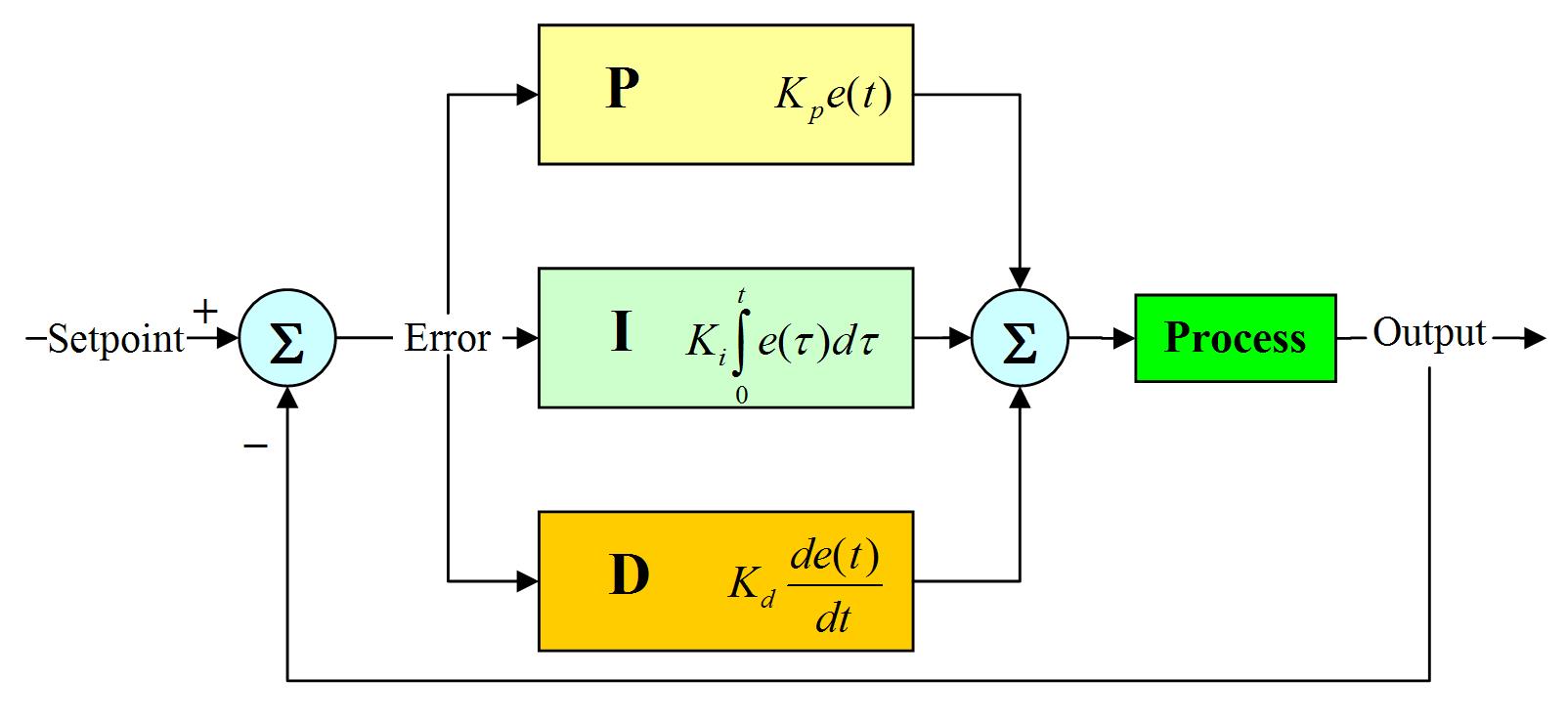
۶– کنترلر PID در اینورتر
در مقالات قبلی به تفصیل به بررسی سیستم های کنترلی حلقه بسته PID پرداختیم. این سیستم ها سه پارامتر تنظیماتی اصلی دارند که شامل پارامترهای P، I و D می شوند. پارامتر D در عموم کاربردها به خصوص تهویه و پمپاژ کاربردی ندارد. اما دو پارامتر دیگر نقشی اساسی در عملکرد کلی سیستم دارند. P که المان تناسبی است تعیین کننده شدت واکنش اینورتر نسبت به تغییرات است، در نتیجه هر چه بالاتر تنظیم شود، تغییرات سرعت خروجی در آن سریع تر خواهد بود.
I نیز المان انتگرالی است و تعیین کننده زمان لختی سیستم است که هر چه بالاتر باشد سیستم به صورت تجمیعی دیرتر واکنش نشان می دهد. در تنظیم سیستم کنترلی حلقه بسته PID باید تنظیم پارامتر استندبای نیز مد نظر قرار داده شود تا زمانی که هیچ باری روی سیستم وجود ندارد، اینورتر به صورت خودکار موتور را خاموش کند و با ایجاد نیاز در سیستم مجددا موتور را روشن کند. تنظیم زمانی مناسب برای استندبای عموما بین ۳۰ تا ۶۰ ثانیه می باشد.( یک نمونه از تعمیرات اینورتر به صورت تخصصی)
۷– تنظیم خودکار (AUTOTUNE) در اینورتر
اینورترهای کنترل دوری که دارای مود کنترل برداری هستند باید قبل از اولین راه اندازی مدل موتور را استخراج کنند. برایاین کار کافیست اطلاعات پلاک موتور مانند ولتاژ، جریان و ضریب توان را در پارامترهای مربوط به خودشان وارد کنید و سپس پارامتر تنظیم خودکار را فعال نمایید. سپس، اینورتر شروع به انجام برخی تست های موتوری و اندازه گیری مقادیری چون مقاومت استاتور و روتور و اندوکتانس استاتور می کند. با اندازه گیری این مقادیر، اینورتر می تواند موتور با به شکل کاملا دقیق کنترل نماید.
۸– اضافه بار مجاز اینورتر
اینورتر به گونه ای طراحی می شود که معمولا بتواند کمی بالاتر از جریان نامی شا نیز به مدت کوتاهی کار کند. زمانی که موتور دچار اضافه بار می شود ممکن است به صورت موقت نیاز به جریان بیشتری داشته باشد تا بتواند گشتاور لازم برای چرخش بار را فراهم کند و سپس مجددا به حالت کارکرد نامی خود باز گردد. بنابراین اینورتر نیز باید قابلیت اضافه بار داشته باشد. اینورترهای صنعتی معمولا می توانند تا ۱۵۰% جریان نامی خود برای مدت ۶۰ ثانیه اضافه بار را تحمل کنند و این مقدار برای مدل های عادی به ۱۱۰% برای ۶۰ ثانیه کاهش می یابد. در بسیاری از کاربردها همچون برنامه های بالابری، تسمه نقاله های شیب دار، بال میل و میکسرها قدرت اضافه بار بالا بسیار ضروری است چون در تمامی این کاربردها در لحظه راه اندازی موتور باید گشتاورهای بالای را تامین نماید.( مشکلات رایج در تعمیرات اینورتر)
۹– تقویت گشتاور در اینورتر
اینورتر در سرعت های بسیار پایین نمی تواند عملکرد گشتاوری خوبی که در سرعت های بالا دارد را ارائه نماید. این امر به خصوص زمانی که از روش کنترلی V/F استفاده می کنیم مشهود است و عملا در سرعت های زیر ۵ هرتز ممکن است موتور توان چرخاندن بار را از دست بدهد. در این حالت با افزایش ولتاژ می توان کمی گشتاور خروجی موتور را تقویت کرد. با تنظیم این پارامتر، اینورتر در سرعت های پایین به طور خودکار ولتاژ اعمالی به موتور را افزایش می دهد. مقدار این پارامتر بهتر است زیر ۱۰% تنظیم شود چون افزایش ولتاژ زیاد ممکن است باعث اشباع موتور و بالا رفتن حرارت آن شود.
امیدواریم که مطالب فوق برای شما مفید واقع شده باشد همچنین شما می توانید مطالب مرتبط دیگر ما از انواع خطا در تعمیرات اینورتر و مطالعه موردی تعمیرات اینورتر مدل لنز ۸۲۰۰ را مطالعه کنید

){kind=link}
بدون دیدگاه