

[vc_row][vc_column][vc_column_text css=”.vc_custom_1629136111043{margin: 0px !important;padding: 10px !important;background-color: #e5e5e5 !important;border: 2px initial #424242 !important;border-radius: 10px !important;}”]
عمده ترین تفاوت درایو کنترل سرعت و سافت استارتر، توانایی تنظیم سرعت با توجه به نیاز کاربر در درایوها است. پس با توجه به این موضوع میتوان فهمید در کل دوره بهره برداری از موتور درایو در مدار باقی میمانند اما راه اندازهای نرم پس از به پایان رسیدن مرحله راه اندازی از مدار خارج میشوند و تا راه اندازی بعدی از مدار خارج هستند.
[/vc_column_text][vc_column_text]
دستگاه اینورتر چیست؟
اینورتر، درایو، VFD، VSD، کنترل دور و… همگی نام هایی رایج برای پیچیده ترین و پیشرفته ترین تجهیز مرتبط با کنترل ماشین های الکتریکی هستند. اینورتر یک تجهیز الکترونیک قدرت است که به واسطه آن می توان سرعت موتورهای الکتریکی AC را کنترل کرد.
کنترل سرعت موتورهای القایی AC یا همان موتورهای آسنکرون، برخلاف موتورهای DC همواره با چالش مواجه بوده است. ماشین های DC معمولا دو سیم پیچ دارند (سیم پیچ های میدان و آرمیچر) به همراه جاروبک ها و کموتاتور، اما ماشین القایی فقط یک سیم پیچ استاتور دارد به همراه روتور.
شرکت لیان الکتریک ویرا پیشرو در ارائه خدمات رله حفاظتی ، انواع اینورتر ، سافت استارتر و راه اندازهای نرم Soft Starter ، کنترل دورهای موتور Drive ، تجهیزات تابلویی فشار ضعیف و متوسط و سایر تجهیزات ابزار دقیق می باشد.

موضوعات مورد بحث در مورد اینورتر
|
ادامه مطالب اینورترروتور معمولا از شیارهای رسانایی مانند آلیاژ آلومینیوم و مس روی هسته آهنی ساخته می شود. در موتورهای القایی خبری از جاروبک ها و کموتاتور نیست، به همین دلیل ماشین القایی ارزان تر، ساده تر و قابل اطمینان تر است. با این تفاسیر، تعجبی ندارد که چرا اکثر موتورهای مورد استفاده در صنایع مختلف دنیا موتورهای القایی هستند. اما اساس عملکرد یک ماشین القایی چیست، و چرا برای تغییر سرعت نیاز به اینورتر دارد؟ |
نوع برق و قدرت در اینورتر
1. قدرت اوج و قدرت معمولی یا متوسط در اینورتر
اینورتر برای استفاده در شرایط مختلف به قدرت بالا ، جریان سریع و موج دار و قدرت معمولی یا متوسط نیاز دارد. قدرت اوج یک اینورتر ، حداکثر قدرتی است که اینورتر می تواند معمولاً برای مدت زمان کوتاه تأمین کند. بسیاری از وسایل فعلی سنگین مانند موتور و یخچال و فریزر به توان قدرت اوج راه اندازی نسبت به زمان لازم نیاز دارند. قدرت معمولی نیرویی است که اینورتر به طور مداوم به آن می دهد. این معمولاً بسیار پایین تر از توان اوج است. شااین ذکر است که قدرت معمولی اینورتر در تخمین ظرفیت باتری مفید است.
2. بر اساس امتیاز قدرت اینورتر
اینورترها در “رتبه بندی اندازه” در بازه VA 50 تا 50000 VA در دسترس هستند. باید به این نکته اشاره کنیم که اینورترهای بزرگتر از 11000 VA به ندرت در برنامه های خانگی مورد استفاده قرار می گیرند. اولین موردی که در مورد سیستم اینورتر باید در نظر بگیرید ، حداکثر قدرت اوج یا قدرت افزایش آن و تأمین جریان پایدار است. ضریب افزایش قدرت معمولاً در این چند ثانیه در وات مشخص می شود. این بدان معنی است که اینورتر برای مدت کوتاهی بار بیش از حدی را تحمل می کند. این “ظرفیت افزایش” بین اینورترها و حتی با همان مارک متفاوت خواهد بود. به طور کلی 3-15 ثانیه سرعت افزایش برای پوشش 99٪ لوازم کافی است. اینورترها با کمترین میزان افزایش سرعت ، انواع سوئیچینگ الکترونیکی با سرعت بالا هستند.
بررسی ترانسفورماتور سه فاز
برای شروع بهتر است به بررسی ترانسفورماتور سه فاز شکل زیر بپردازیم.
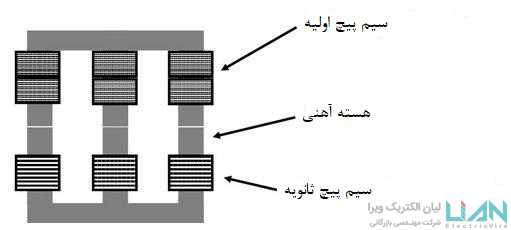
اگر به سیم پیچ اولیه ترانسفورماتور برق سه فاز متصل کنیم، یک جریان سینوسی در سیم پیچ اولیه جاری خواهد شد. این جریان موجب به القا شدن شار مغناطیسی در هسته آهنی ترانسفورماتور می شود، که این شار با موج ولتاژ سینوسی ورودی نوسان می کند. این نوسان در سیستم قدرت ایران دارای فرکانس 50 Hz است.
این شار مغناطیسی متغیر موجب القای ولتاژ در سیم پیچ ثانویه می شود و اگر به دو سر سیم پیچ ثانویه باری متصل باشد، جریان در سیم پیچ دوم جاری خواهد شد. نسبت تعداد دورهای سیم پیچ اولیه به ثانویه، تعیین کننده نسبت ولتاژ اولیه به ثانویه خواهد بود، و این کاربرد اصلی ترانسفورماتورهاست.
حال تصور کنید که سیم پیچ ها و هسته را جمع کنیم، یک فاصله هوایی اندک بین هسته اولیه و ثانویه به وجود آوریم و اجازه دهیم که سیم پیچ ثانویه که الان دیگر روتور نام دارد، آزادانه بچرخد. این اساس یک موتور القایی خواهد بود که در شکل زیر به نمایش در آمده است.
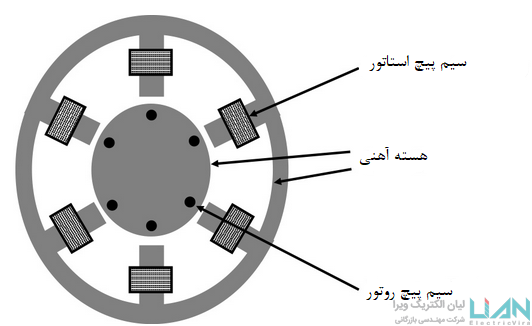
حال زمانی که یک تغذیه سه فاز را به سیم پیچ اولیه (که دیگر استاتور نام دارد) متصل کنیم، همان پدیده ترانسفورمری قبلی رخ می دهد و جریان در سیم پیچ های روتور جاری خواهد شد. همانطور که ذکر شد، روتور معمولا دارای شیارهای رسانایی روی هسته آهنی است که در دو طرف اتصال کوتاه شده اند و نقش سیم پیچ ثانویه را بازی می کنند. از آنجا که روتور در این حالت شبیه یک قفس می شود، به این موتور گاها موتور قفس سنجابی نیز می گویند.
شکل زیر ساختار رایج یک موتور القایی را نشان می دهد.
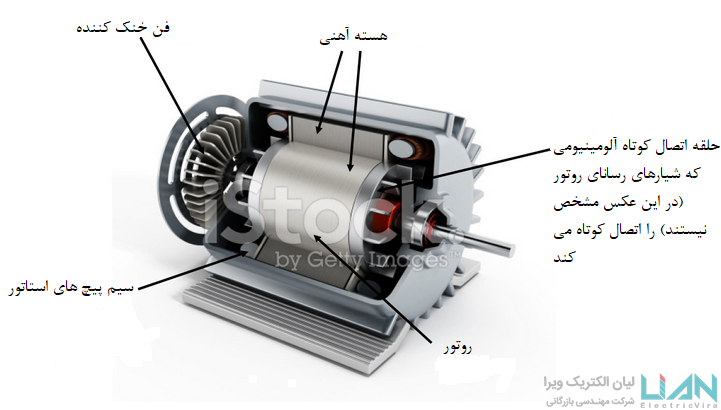
حال اگر ما یک میدان مغناطیسی و جریان الکتریکی ایجاد کنیم، می توانیم نیرویی داشته باشیم که بر اساس قانون دست چپ فلمینگ موجب چرخیدن روتور می شود، و این کلیت کارکرد یک موتور است. روتور سرعت می گیرد چون می خواهد دائما میدان مغناطیسی دوار استاتور که با فرکانس 50 Hz برق تغذیه در حال نوسان است را دنبال کند و به آن برسد،
در نتیجه این عمل ترانسفورمری تنها با برق AC امکان پذیر می باشد. حال اگر سرعت روتور به سرعت دوران یا نوسان میدان مغناطیسی استاتور برسد، دیگر نیروی برایندی بین میدان های مغناطیسی به وجود نمی آید و این به معنی از بین رفتن گشتاور و متوقف شدن موتور است، به همین دلیل است که در موتورهای القایی همواره سرعت روتور کمی کمتر از سرعت فرکانس تغذیه اعمالی است و به آن ها موتورهای آسنکرون نیز اطلاق می شود. این اختلاف سرعت را لغزش می نامند. وقتی یک موتور القایی زیر بار برود، لغزش کمی افزایش می یابد و جریان بیشتری کشیده می شود.
بنابراین سرعت چرخش موتورهای القایی به فرکانس تغذیه آنها بستگی دارد. یعنی اگر فرکانس 50Hz به یک موتور القایی اعمال شود، با سرعت نامی خود شروع به چرخش خواهد کرد. اگر فرکانس 25Hz اعمال شود با نصف سرعت نامی خود کار خواهد کرد. در نتیجه اگر تجهیزی داشته باشیم که بتواند موج سینوسی با فرکانس دلخواه را در اختیار موتور قرار دهد، خواهیم توانست سرعت موتور را کنترل کنیم؛ این دقیقا کاری است که اینورتر انجام میدهد.
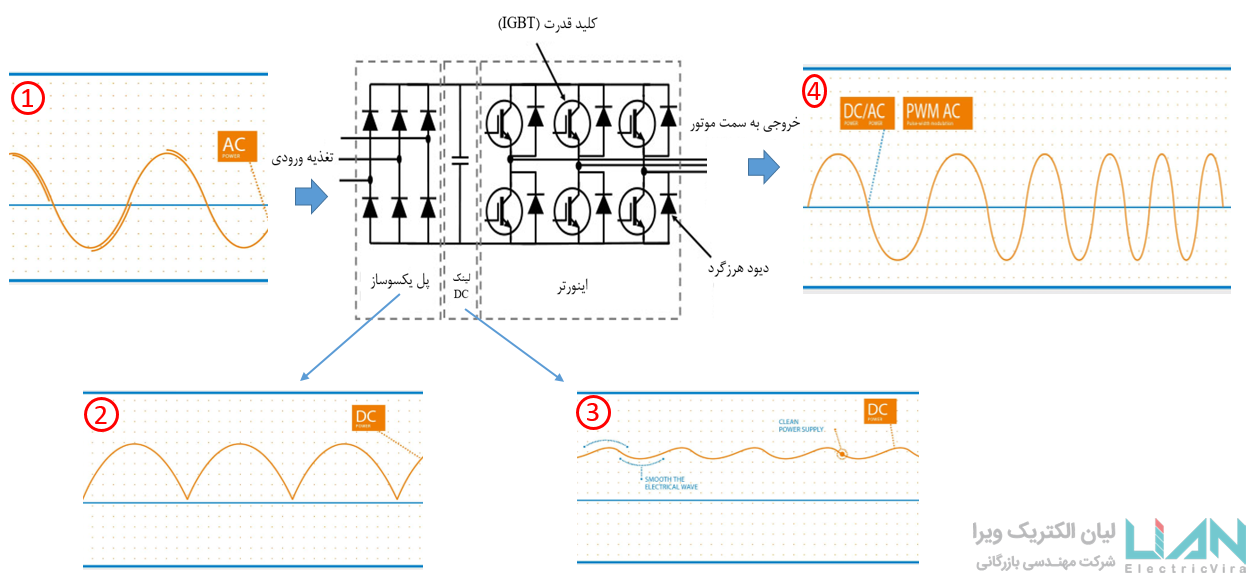
وظیفه اینورتر دریافت ولتاژ سینوسی شبکه با فرکانس 50Hz و تبدیل آن به موج سینوسی با فرکانس دلخواه در خروجی است. اما اینورتر چگونه این تبدیل فرکانس را امکان پذیر میکند؟ این فرآیند نیازمند سه ماژول اصلی است: پل یکسو ساز در ورودی، لینک DC در قسمت میانی و ماژول اینورتر IGBT در خروجی.
طرز کار اینورتر
مراحل کار اینورتر بر اساس شکل موج توان و تبدیلهای صورت گرفته روی تصویر شماره گذاری شده است. حال بیایید ببینیم در هر مرحله چه اتفاقی رخ میدهد.
- در مرحله اول شکل موج ولتاژ ورودی را مشاهده میکنید. با فرض شبکه فشار ضعیف رایج در ایران، یک موج سینوسی 400vAC و 50Hz به عنوان تغذیه به ورودی اینورتر متصل میشود. در سر راه ورودی و قبل از رسیدن به پل دیودی المانهای مختلفی میتوانند قرار داشته باشند. برخی سازندگان درایو وریستورهای (varistor) کوچکی در این مسیر قرار میدهند تا درایو در برابر اضافهولتاژهای جزئی بتواند تا حدودی از خود محافظت کند. به هرحال این موج سینوسی پس از عبور از المانهای فرعی، به اولین ماژول اصلی یعنی پل دیودی میرسد.
- پل دیودی وظیفه یکسوسازی را بر عهده دارد. یکسوساز (Rectifier) یا کانورتر (Converter) سایر نامهایی است که به این ماژول اطلاق میشود. یکسوسازی به معنی تبدیل موج متناوب AC به موج مستقیم DC است. یکسوسازی اصطلاحا به واسطه “بُرِش زدن” موج ورودی توسط دیودها امکانپذیر میشود، در نتیجه همانطور که در شکل موج شماره 2 مشاهده میکنید، موج DC بدست آمده در خروجی پل دیودی دارای اعوجاج و غیریکنواخت است یا اصطلاحا ریپل دارد. این در حالیست که که IGBT ها به عنوان ماژول خارجی اینورتر، نیازمند یک موج DC صاف و یکنواخت هستند تا بتوانند به صورت مناسب عمل کنند.
- خازنها المانهای دوستداشتنی دنیای برق هستند. این تجهیزات علاوه بر مصارف فراوان دیگر مثل اصلاح ضریب توان و جبرانسازی ولتاژ محلی، قابلیت صاف کردن و رفع ریپل موجها را نیز دارند. موج تولید شده توسط پل دیودی در مرحله 2 به روی خازنها در لینک DC منتقل میشود و خازنها وظیفه صاف کردن موج را بسیار خوب انجام میدهند تا همانطور که در شکل 3 میبینید، یک موج DC تقریبا صاف و یکنواخت داشته باشیم.
- IGBTها ماژول اصلی درایو هستند که به آنها اینورتر (Inverter) نیز اطلاق میشود. اینورتر یعنی تبدیل کننده موج DC به موج AC با فرکانس مورد نظر. بنابراین احتمالا متوجه شدهاید چرا اینقدر زحمت کشیدیم تا موج AC ورودی به درایو را به یک موج DC تبدیل کنیم و سپس در اختیار IGBT قرار دهیم! IGBTها پس از دریافت شکل موج DC مرحله 3، با کلیدزنی و تولید پالسهای مربعی، موج سینوسی AC خروجی با فرکانس دلخواه را برای ما میسازند. به این روش در تئوری اصطلاحا مدولاسیون پهنای باند (PWM) میگویند. IGBTها از پیشرفتهترین تجهیزات الکترونیک قدرت میباشند و هرچه سرعت کلیدزنیشان بالاتر باشد، میتوانند موج AC مطلوب تری را برای ما بسازند. شکل موج شماره 4 همان موج تولیدی نهایی اینورتر است که فرکانسش متغیر بوده و به موتور اعمال میشود.
اینورتر، درایو، VFD، VSD، کنترل دور و… همگی نام هایی رایج برای پیچیده ترین و پیشرفته ترین تجهیز مرتبط با کنترل ماشین های الکتریکی هستند. اینورتر یک تجهیز الکترونیک قدرت است که به واسطه آن می توان سرعت موتورهای الکتریکی AC را کنترل کرد.کار اینورتر دریافت ولتاژ سینوسی شبکه با فرکانس 50Hz و تبدیل آن به موج سینوسی با فرکانس دلخواه در خروجی است. اما اینورتر چگونه این تبدیل فرکانس را امکان پذیر میکند؟ این فرآیند نیازمند سه ماژول اصلی است: پل یکسو ساز در ورودی، لینک DC در قسمت میانی و ماژول اینورتر IGBT در خروجی.
تفاوت های راه انداز نرم و اینورتر
شناخت کامل تفاوت ها و قابلیت های اینورتر و راه انداز نرم می تواند استفاده از این تجهیزات را برای کاربریهای مختلف مناسب نماید. برخی از ویژگی های کاربردی اینورتر (درایو) و راه انداز نرم بدین شرح است:
- عمده ترین تفاوت درایو کنترل سرعت و سافت استارتر، توانایی تنظیم سرعت با توجه به نیاز کاربر در درایوها است. پس با توجه به این موضوع میتوان فهمید در کل دوره بهره برداری از موتور درایو در مدار باقی میمانند اما راه اندازهای نرم پس از به پایان رسیدن مرحله راه اندازی از مدار خارج میشوند و تا راه اندازی بعدی از مدار خارج هستند.
- درایو دارای سایز فیزیکی بزرگ تری نسبت به راه انداز نرم می باشد و در نتیجه به فضای بیشتری نیاز دارد. هم چنین، سنگین تر بودن آن نسبت به راه انداز نرم آن را برای کاربردهایی که وزن دستگاه مهم می باشد چندان مناسب نیست.
- از آنجایی که درایو فرکانس را تغییر می دهد و در حقیقت در خروجی آن یک شکل موج شبه سینوسی (SPWM یا مربعی) ایجاد میگردد، ولتاژی هارمونیکی به موتور اعمال مینماید. از بین بردن این هارمونیکهای ولتاژ نیاز به فیلترهای سینوسی (Sine Filter) دارند که فیلترهای پر هزینهای هستند. شکل زیر یک فیلتر سینوسی را نشان میدهد.

فیلتر سینوسی
اگر کاربر از فیلترهای سینوسی استفاده نکند، استفاده از درایو در شرایطی باعث گرم شدن موتور میگردد. توجه به این نکته ضروری است که هارمونیکهای خروجی درایوها ممکن است مشکلاتی برای تجهیزات اندازه گیری موتور نیز ایجاد نماید.
- از آنجایی که در ورودی درایوها یکسوکننده های دیودی تعبیه شده است؛ وجود این یکسوکننده ها سبب ایجاد هارمونیک در شبکه و تاثیر منفی در عملکرد سایر تجهیزات می شود. برای رفع این مشکل لاین فیلتر در ورودی درایوها استفاده میشود و تا حدی میتواند این مشکل را مرتفع کند، اما به طور معمول این مشکل به طور کامل رفع نمیگردد مگر آنکه از لاین فیلترهای گرانقیمت تر استفاده شود. این موضوع در صنایع پزشکی بسیار حیاتی است. شکل زیر یک لاین فیلتر را نشان میدهد.

یکی دیگر از راه حل هایی که این مشکل را به طور کامل میتواند حل کند استفاده از یکسوکننده های فعال (Active Rectifier) در ورودی درایوها است.
- با توجه به اینکه توان ورودی درایو برابر با توان خروجی به علاوه تلفات می باشد، برای بارهایی که نیاز به گشتاوری بالاتر از گشتاور فراهم شده به وسیله راه انداز نرم (با توجه به محدودیت های اعمال شده به وسیله سیستم توزیع) دارند، یک اینورتر می تواند راه حل مطلوب باشد. در نتیجه اگر در هنگام انتخاب درایو یا راه انداز نرم گشتاور راه اندازی مسئله اصلی باشد، با توجه به اینکه نسبت گشتاور به جریان در اینورتر بسیار بیشتر از راه اندازهای نرم می باشد، این مبدل می تواند بهترین گزینه تلقی شود. هر چند در مورد کاربردهای پمپ در صنعت آب و فاضلاب، این مسئله چندان مهم نیست. در درایو امکان دستیابی به گشتاور کامل در سرعت صفر امکان پذیر است اما در راه انداز نرم گشتاور راه اندازی مقدار مشخص دارد که توسط کاربر مشخص میشود و هیچگاه 100% نیست.
- یک درایو می تواند برای اندازه گیری دما، فشار یا جریان فرآیند استفاده شود، بدون اینکه نیاز به سیستمهای اضافه در کنار خود داشته باشد. زیرا در درایوها به منظور انجام کنترل سنسورهای جریان و ولتاژ تعبیه شده است. در ضمن کاربر میتواند سنسورهای دیگری مانند فشار به درایوها متصل نماید. در درایوها چند ورودی آنالوگ تعبیه شده است که در راه اندازهای نرم این ورودیها وجود ندارند.
- استفاده از درایو منجر به کاهش انتشار گاز دی اکسید کربن میشود و تاثیرات زیست محیطی مثبتی دارند.
استفاده از درایو باعث تحمیل هزینه های زیادی به سیستم میشود به دلیل آنکه تجهیزات استفاده شده در آن گران قیمت هستند. به عنوان نمونه قیمت یک ماژول تریستور (دارای 2 تریستور) 100 آمپر در ایران در حدود 200 هزار تومان است اما یک ماژول IGBT با همین سطح جریان در حدود 500 هزار تومان است. این موضوع برای المان های دیگر نیز صادق است و هزینه درایو را به شدت افزایش میدهد. دو شکل زیر ماژول IGBT و تریستور 100 آمپری را نشان میدهند.

ماژول IGBT

ماژول تریستور
- هزینه نگهداری سافت استارتر پایین است چون به غیر از منافذ فن که باید تمیز نگه داشته شوند، به نگهداری دیگری نیاز ندارد. اما در مقابل اینورتر به دلیل داشتن بخش های مختلف مانند دیود، خازن، ادوات نیمه هادی و … دارای هزینه نگهداری سالیانه بالایی است.
کاربرد اینورتر
با توجه به موارد گفته شده میتوان کاربردهای اینورتر (درایو کنترل سرعت) را در موارد زیر در نظر گرفت:
- استفاده از برق تک فاز در بسیاری از کاربردهای صنعتی در ورودی اینورتر و راه اندازی موتورهای سه فاز
- کنترل سرعت و قابلیت های سیستم، داشتن حداکثر توان در سرعت های پایین Vector control در زمان عملکرد و به صورت دائم
- کاربری هایی با گشتاور راه اندازی بالا
- فیدبک مداوم برای کنترل های خاص و دقیق مثل PID Control و Position control
- راه اندازی و توقف های پیدرپی و مداوم.
- تغییر جهت چرخش موتور به صورت پیدرپی و مداوم.
- بازه بسیار بالا و مطمئن و دقیق شیب راه اندازی و شیب توقف در بعضی ازمدل ها تا ۵۰۰۰ ثانیه.
- بالا بردن سرعت موتور بیشتر از سرعت نامی (البته با در نظر گرفتن محدودیتهای موتور)
- نصب و همسان سازی با موتورها از نظر ولتاژ و فرکانس کاری.
- دقت بسیار بالا در ولتاژ و فرکانس خروجی حتی در مواقع تغییر ولتاژ در ورودی.
در کنار این موارد توجه به یک نکته ضروری است که با متصل کردن درایو به یک موتور سرعت ثابت، یا یک موتور که برای عملکرد پیوسته در حداکثر سرعت تنظیم شده است، صرفه جویی انرژی بدست نخواهد آمد و در کل می تواند منجر به مصرف انرژی بالاتری شود. چرا که در بهره برداری در سرعت نامی، موتور به صورت مستقیم میتواند به شبکه متصل باشد و توان خود را مستقیم از شبکه دریافت نماید، اما با وجود درایو (که بازده آن کمتر از 100 درصد است)، انرژی بیشتری از شبکه دریافت خواهد شد.
پس از آنکه با طرز کار این محصول آشنا شدید، اگر در کاربرد آن دچار مشکلی شدید می توانید جهت انجام تعمیرات اینورتر با کارشناسان و متخصصان ما در لیان الکتریک ارتباط برقرار کنید.
[call_to_action title=”” icon=”icon-lamp” link=”https://www.lianelectric.com/%d8%aa%d8%b9%d9%85%db%8c%d8%b1%d8%a7%d8%aa-%d8%a7%db%8c%d9%86%d9%88%d8%b1%d8%aa%d8%b1-4/” button_title=”تعمیرات اینورتر” class=”” target=”_blank” animate=””][/call_to_action]
کاربرد اینورتر در جرثقیل ها و آسانسورها
جابجایی عمودی بار یکی از مهم ترین کاربردهای اینورترهای کنترل دور هستند. اگر از من بپرسید، این کاربردها چالش برانگیزترین کاربردهای اینورترها نیز می باشند، چون شما علاوه بر این که باید قدرت و دقت بالایی به کار ببندید، با یک مساله کیفی به نام آسایش و راحتی سفر به خصوص در مورد آسانسورها باید سر و کله بزنید. بنابراین محکم بنشینید تا نگاهی دقیق تر داشته باشیم به این نوع کاربردها.
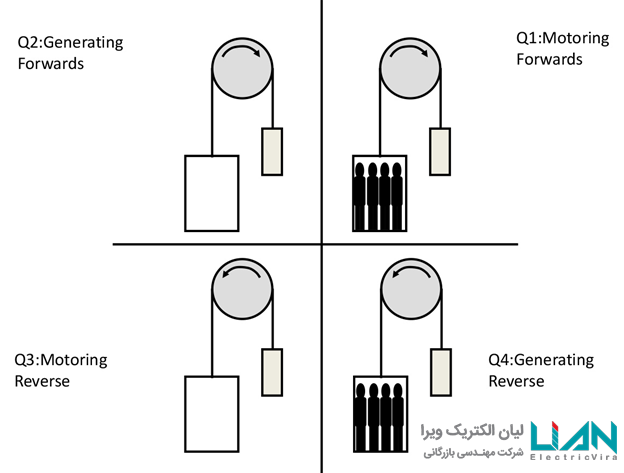
وقتی چیزی را بلند می کنید ، به وضوح کار انجام می دهید. وقتی چیزی را پایین می آورید، اگر از ترمز (یا اصطکاک بیش از حد) استفاده نکنید ، انرژی را از بار می گیرید، بنابراین بازگشت انرژی وجود دارد. این بدان معناست که در بیشتر کاربرد ها باید تصمیم بگیریم با انرژی برگشتی از موتور چه کار کنیم.
مقاله “ترمزگیری و انرژی بازگشتی” این موضوع را به صورت کامل توضیح می دهد. در عمل برای کاربردهای دارای اینورتر، باید یک مقاومت ترمز مناسب بر اساس اندازه درایو و میزان لختی بار و غیره انتخاب کنید. در آسانسورها لزوما این اتفاق نمی افتد چون دارای وزنه تعادل هستند. بنابراین ممکن است حتی بالا بردن اتاقک آسانسور نیز، به خصوص اگر خالی باشد، انرژی بازگشتی تولید کند.

آسانسورها بالا و پایین می روند و ممکن است پر یا خالی باشند. این بدان معناست که درایو بایدمستقیم و معکوس موتور را بچرخاند و در هر لحظه آماده کارکرد موتوری و انرژی دادن به موتور یا کارکرد ژنراتوری و دریافت انرژی از موتور باشد. این یک مختصات عملکردی چهار وجهی برای کاربرد درایو روی آسانسورها به وجود می آورد. برخلاف آسانسورها، جرثقیل ها غالبا رفتار ساده تری دارند و هنگام بالا کشیدن بار به صورت موتوری و در هنگام پایین بردن بار به صورت ژنراتوری عمل می کنند. چهار ربع عملکردی يك آسانسور در شكل 1 نشان داده شده است.
هنگامی که آسانسور یا جرثقیل نزدیک به توقف باشد، یک ترمز الکترومکانیکی وارد کار می شود و روتور موتور را به صورت فیزیکی قفل می کند تا از توقف مطمئن بار اطمینان حاصل شود. این ترمز الکترومکانیکی توسط درایو کنترل می شود. زمانی که بار متوقف باشد و درایو بخواهد شروع به حرکت دادن بار بکند، ترمز همچنان قفل است. درایو ابتدا موتور را مغناطیسه می کند و کمی در آن گشتاور اولیه ایجاد می کند و سپس ترمز را باز کرده و بار را به حرکت در می آورد.
این تاخیر کوچک باعث می شود در لحظه رهاسازی ترمز الکترومکانیکی، بار ناگهان از کنترل درایو خارج نشود و درایو بتواند به واسطه یک گشتاور اولیه، بار را به صورت مناسب کنترل کند و به حرکت در بیاورد. دقیقا عکس این موضوع در زمان کاهش سرعت نیز رخ می دهد. زمانی که درایو در حال کاهش سرعت موتور برای توقف کامل است، قبل از این که سرعتش کاملا صفر هرتز شود ترمز الکترومکانیکی را می بندد و سپس موتور را رها می کند.
تمامی مقادیر گشتاوری و زمان های تاخیر مذکور توسط کاربر قابل تنظیم بوده و در درایوهای پیشرفته ای همچون INVERTEK P2 و ACS 880 پارامترهای مختلفی برای کنترل بارهای آسانسوری و جرثقیل ها در نظر گرفته شده است.
یک نکته که در استفاده از رله های خروجی درایو برای کنترل ترمز مکانیکی حائز اهمیت است این است که بووین (شنت) کنتاکتورهای ترمزهای الکترومکانیکی دارای خاصیت القایی بالایی هستند و ممکن است به دلیل کشیدن جریان های زیاد باعث سوختن رله خروجی درایو شوند، در نتیجه بهتر است در سر راه آن ها ا یک رله شیشه ای به عنوان واسط بهره برده شود.
لحظات راه اندازی و توقف از اهمیت دوچندانی در جابجایی عمودی بارها برخوردارند. اگر از پس آن ها بر بیاییم، تنظیم و بهبود کیفیت باقی قسمت ها کار آسان تری خواهد بود. مسائل ایمنی مختلفی وجود دارند، مثلا جرثقیل های بزرگ ممکن است به یک برنامه نرم افزاری برای جلوگیری از تاب خوردن بار نیاز داشته باشند و در نتیجه ممکن است نیازمند اینورترهای بسیار قدرتمند و پیچیده باشند که تنها برخی سازندگان در دنیا اقدام به تولید آن ها می کنند.
اما در مورد آسانسورها مساله باز هم پیچیده تر است. اینجا فقط بالا و پایین بردن بار اهمیت ندارد، آسایش و نرمی سفر و همچنین ایمنی مسافران و توقف دقیق در محل خروجی درب های آسانسور مسائلی هستند که باید در نظر گرفته شوند. همچنین کارکرد در زمان اضطرار نیز باید برای اینورتر در نظر گرفته شود.
برخی سازندگان این توابع خاص را در یک درایو مخصوص آسانسور می گنجانند و به عنوان مدل آسانسور آن را معرفی می کنند. برندهایی همچون اینورتک، جفران و یاسکاوا چنین رویکردی دارند و مدل هایی مخصوص کاربرد آسانسور طراحی کرده و به فروش می رسانند.
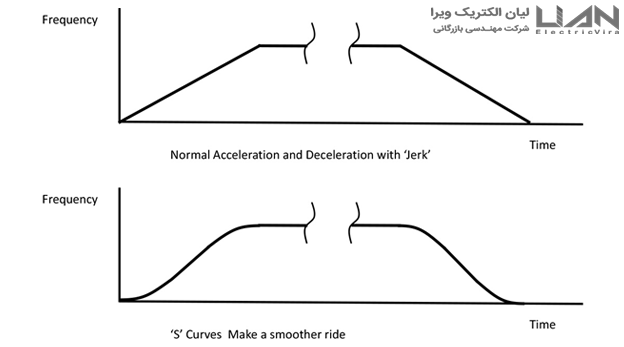
به عنوان مثال، برای جلوگیری از تغییرات ناگهانی و ضربه ای شتاب، به جای تغییر سرعت خطی، در این درایوها تابع منحنی های S شکل گنجانده شده است تا توقف و راه اندازی نرم باشد. در شکل زیر این منحنی ها را می توانید مشاهده کنید.
این درایوها همچنین قابلیت کنترل کنتاکتور خروجی درایو، جبران رولبک در هنگام راه اندازی و توقف و محاسبات توقف دقیق در مقابل درب طبقه را دارا می باشند.
یک تابع بسیار مهم دیگر برای اینورترهای آسانسور کارکرد اضطراری است. فرض کنید مسافری درون آسانسور در حال حرکت است و ناگهان برق برود. در این حالت درایو باید بتواند مسافر را به صورت ایمن به طبقه بعد برساند تا وی بتواند از آسانسور خارج شود. برای این کاربرد، درایوهای 400VAC مخصوص آسانسور به گونه ای طراحی می شوند که بتوانند با تنظیماتی خاص و فعال شدن حالت اضطراری با برق 230VAC نیز کار کنند. بنابراین با در نظر گرفتن یک UPS با ولتاژ 230VAC می توان این انرژی را برای مدت کوتاهی برای درایو فراهم نمود.
البته این نکته را در نظر داشته باشید که نرم افزاری که کل آسانسور را کنترل می کند خارج از درایو است. در واقع سازندگان آسانسور بردهای کنترلی مخصوصی دارند که برنامه یک آسانسور مثلا 6 نفره را در خود جای داده است و ترتیب حرکت درایو به طبقات مختلف را کنترل می کند.
کنترل برداری
وقتی یک کارشناس فروش درایو کنترل دور (اینورتر) بخواهد درایوش را به شما معرفی کند، دیر یا زود “کنترل برداری” به گوشتان خواهد رسید. در مقالات قبل در مورد این موضوع صحبت کردیم که کنترل برداری منجر به کنترل دقیقتر در موتورهای القایی شده و یک قابلیت لازم و واجب برای کنترل موتورهای آهنربا دائم PM است. خب، کنترل برداری چیست و چرا “خوب” است؟
بیایید به اصول اولیه برگردیم. در مقاله اول در مورد این صحبت کردیم که چگونه می توان سرعت موتور را با تغییر فرکانس اعمالی به آن کاهش داد و چگونه شار- که عامل ایجاد گشتاور است- به ولتاژ اعمالی وابسته است که جریان مغناطیس کنندگی در استاتور ایجاد می کند. حال برای حفظ شار بهینه در موتور، یک درایو کنترل دور (اینورتر) با متد V/F قدیمی، یک رابطه خطی بین ولتاژ و فرکانس برقرار می کند؛ یعنی با کاهش فرکانس از مقدار نامی، ولتاژ هم به همان نسبت کاهش می یابد. بنابراین 400V در 50Hz می شود 300V در 37.5Hz و 200V در 25Hz. گاها برای فائق آمدن بر برخی مشکلات گشتاوری و تلفات میتوان ولتاژ را در فرکانسهای پایین افزایش داد. کنترل ساده ولتاژ به فرکانس (V/f) در شکل زیر به نمایش در آمده است.
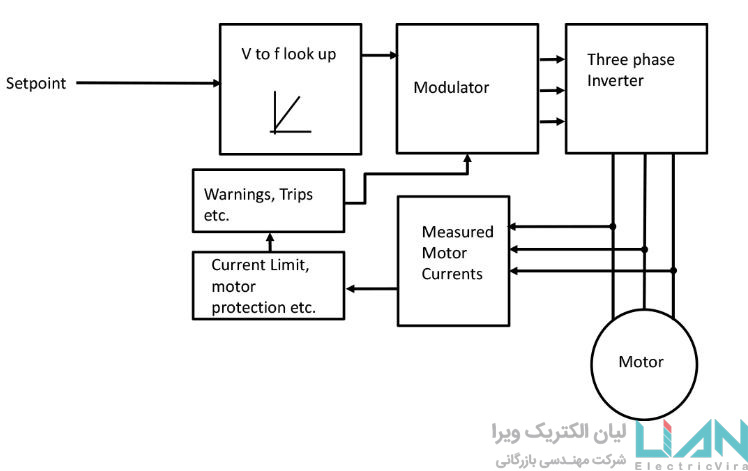
مدولاتور بر اساس ولتاژ و فرکانس مورد نیاز، پالسهای مطلوب برای کنترل IGBT را ایجاد میکند. از جریان اندازهگیری شده برای حفاظت از موتور و درایو کنترل دور (اینورتر) با کاهش فرکانس یا تریپ استفاده میشود.
هرچند برقراری نسبت V/f همیشه منتج به عملکرد مطلوب نمیشود. خصوصیات موتور با تغییر دما تغییر میکند و حفظ سطوح شار مورد نیاز در مقادیر فرکانسی پایین دشوار است. به همین دلیل سازندگان درایو تلاش میکنند جریان مغناطیس کنندگی را اندازهگیری کنند (این جریان تولیدکننده شار است و مقدارش به ولتاژ اعمالی وابسته است) و ولتاژ خروجی را مطابق با آن تنظیم کنند و بدین شکل از برقراری نسبت خطی غیرهوشمندانه بین ولتاژ و فرکانس رهایی یابند. این تا حدودی به حل مشکل کمک میکند، اما برای کنترلی دقیق به خصوص در سرعتهای پایین، جریانهای تولیدکننده شار و گشتاور باید به صورت آنی اندازهگیری و کنترل شوند. بنابراین به دلیل چرخش موتور و ولتاژهای فازی، زاویه و اندازه این جریانها نیز اهمیت پیدا میکند- این یعنی با یک سیستم برداری سر و کار داریم.
بنابراین، حال به جای درایوی که در یک نقطه کار مشخص، ولتاژ و فرکانس مشخصی را تولید میکند، سعی میکنیم شار و گشتاور موتور را مستقیما کنترل کنیم، و این کنترل را دائما تنظیم کنیم تا نقطه کار مورد نظرمان حاصل شود. سیستم کنترلی سادهشده یک درایو کنترل دور (اینورتر) با روش کنترل برداری را در شکل زیر مشاهده میکنید.
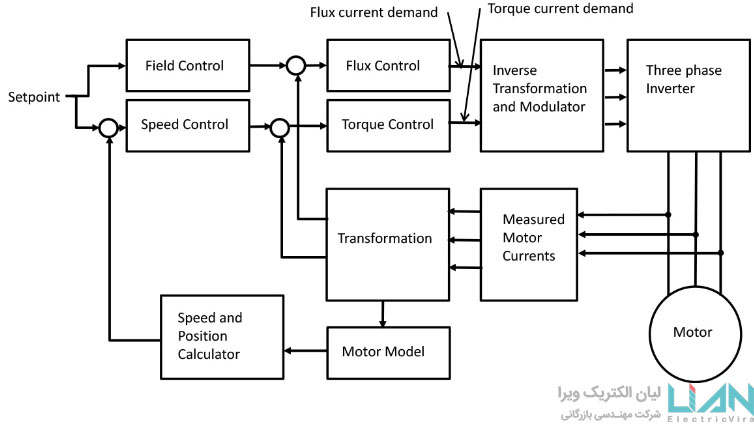
از این شکل میتوانید ببینید که نقطه کار مورد نیاز به یک سرعت و سپس گشتاور مورد نیاز تبدیل میشود و همینطور به میدان و سپس شار مورد نیاز تبدیل میشود که این ها بخشی از سیستم کنترل برداری است.
برای انجام همه این کارها، نیاز به عملیات ریاضی پیچیده و اندازهگیری دقیق جریان وجود دارد. ما همچنین باید خصوصیات موتوری که کنترلش میکنیم را بدانیم.
حال میتوانیم عملیات ریاضی مورد نیاز را با استفاده از ریزپردازندههای موجود انجام دهیم. ما همچنین میتوانیم با استفاده از ادوات اثر هال اندازهگیری جریان خروجی را با دقت بالا انجام دهیم. این ویژگیها در گذشته گزینههای گرانی برای درایوها به شمار میرفتند، اما امروزه تاثیر قیمتی قابل توجهی روی درایوها ندارند و راحتتر از گذشته در دسترس هستند.
با مقایسه شکلهای بالا میتوانید دریابید که کنترل برداری چقدر پیچیدهتر است.
تعیین خصوصیات موتور به کاربری وابسته است که درایو کنترل دور (اینورتر) را تنظیم میکند. با تظنیم مقدار صحیح جریان، ولتاژ و ضریب توان موتور در پارامترهای مربوطه، اطلاعات پایه به درایو کنترل دور (اینورتر) داده میشود. هرچند، اطلاعات اضافی را می توان با اعمال یک تنظیم خودکار Autotune به دست آورد، و اکثر درایوهای دارای کنترل برداری از کاربر میخواهند در صورت استفاده از کنترل برداری، فرایند Autotune را انجام دهند. این فرایند باعث میشود درایو کنترل دور (اینورتر) به صورت خودکار در چند ثانیه پارامترهای بیشتری همچون اندوکتانس اولیه، مقاومت استاتور را اندازهگیری کند که به ساخت مدلی دقیق از موتور و در نتیجه، آسانتر کردن کنترل برداری کمک شایانی میکند.
در برخی درایوها، تاثیر دمای موتور در عملکردش نیز در نظر گرفته میشود (این دما از اطلاعات مربوط به بار و موتور محاسبه میشود)، بنابراین اجرای Autotune در حالی که موتور سرد است اهمیت زیادی دارد.
در گذشته برای دستیابی به یک کنترل برداری خوب و مطمئن توصیه میشد از انکودرها استفاده شود تا سرعت و موقعیت دقیق روتور در اختیار درایو کنترل دور (اینورتر) قرار داده شود. امروزه با با مدلسازی بهتر و سریعتر ریاضیاتی، دیگر نیازی به انکودر نیست. هرچند، در برخی کاربردها همچون آسانسورها و جرثقیلها استفاده از انکودرها همچنان ترجیح داده میشود. اگر انکودر وجود نداشته باشد، درایو کنترل دور (اینورتر) از مدل موتور برای محاسبه سرعت و موقعیت روتور بهره میبرد.
حالا دیگر درایو کنترل دور (اینورتر) سرعت موتور را با تنظیم مستقیم فرکانس کنترل نمیکند (مانند کنترل V/f)، بلکه این کار با کنتل گشاور و شار موتور انجام میپذیرد. بنابرین حالا نقطه سرعت مورد نظر وارد شده توسط کاربر به یک گشتاور و شار مورد نیاز تبدیل میشود که در شکل دوم آن را میبینید. به عبارت دیگر درایو کنترل دور (اینورتر) میگوید:”بر اساس دانش موجود از موتور، به چقدر گشتاور و شار مغناطیسی نیاز داریم تا سرعت موتور را روی مقدار مورد نیاز حفظ یا تنظیم کنیم؟” از آنجا که درایو کنترل دور (اینورتر) گشتاور و شار را مستقیما کنترل میکند، عملکرد درایو کنترل دور (اینورتر) نسبت به روش سنتی V/f بهبود مییابد.
درایو کنترل دور (اینورتر) به تغییرات ناگهانی بار واکنش بهتری میدهد، بازدهیاش بالاتر میرود و راحتتر میتواند انواع موتور همچون موتورهای آهنربا دائم PM و سنکرون رلوکتانس که در مقالات قبلی مورد بحث قرار گرفتند را کنترل کند. تنظیم سرعت بسیار بهتر است و جبران لغزش نیز به صورت خودکار صورت میگیرد.
در شکل دوم همچنین مشاهده میکنید که جریان خروجی در درایو کنترل دور (اینورتر) پایش میشود و به المانهای تولید کنند شار و گشتاور تقسیم میشود. این مقادیر اندازهگیری شده به کنترلرهای گشتاور و شار بازخورد داده میشوند بنابراین ما کنترل حلقه بسته این مقادیر را در یک سیستم کنترلی کامل با نقاط جمعکننده و بهرههای کنترلی داریم که دقیقا مثل یک سیستم کنترلی حلقه بسته PID کار میکند.
از آنجا که جریانها سه فاز اندازهگیری میشوند، این مقادیر باید به یک جریان واحد شار (جریان مغناطیس کنندگی) و یک جریان گشتاور (بار) تبدیل و تقسیمبندی شود. این تبدیلهای ریاضیاتی همچنین برای تبدیل مجدد جریانهای مورد نیاز شار و گشتاور به جریان سه فاز و سپس تبدیل به سیگنالهای مدولاسیون که به بخش قدرت درایو کنترل دور (اینورتر) فرمان میدهند مورد استفاده قرار میگیرند.
همچنین باید در نظر بگیرید که سرعت تخمین زده شده (که با استفاده از جریانهای شار و گشتاور و مدل موتور محاسبه میشوند) در یک حلقه بسته سوم بازخورد گرفته میشوند که این حلقه برای کنترل سرعت موتور مورد استفاده قرار میگیرد.
بنابراین سیستم کنترل برداری نیاز به اندازهگیریها و محاسبات زیادی دارد و دارای سه کنترل حلقه بسته است. در روزهای ابتدایی پیدایش کنترل برداری، پایدار کردن این سیستم بسیار دشوار بود و بهرهبرداری و تنظیم برخی درایوها به خصوص بدون انکودر کاری دشوار بود. امروزه، درک بهتر مدلهای موتور کنترل برداری را سادهتر و قابل اطمینانتر کرده است.
کنترل برداری مزایای مختلفی همچون حفظ بهتر سرعت، پاسخ بهتر به تغییر ناگهانی بار و گشتاور بسیار بهتر در سرعتهای پایین دارد. موتورها نیز با بازدهی بالاتری کار میکنند و در نتیجه دمای کاریشان پایینتر می اید.
اینورتک همواره کنترل برداری ساده و موثری را ارائه داده است که تنظیمات آسانی را نیز در اختیار میگذارد. درایو کنترل دور (اینورتر) P2 ویژگیهای کنترل برداری کاملی همچون کنترل گشتاور و گشتاور سرعت پایین عالی را به ارمغان میآورد. درایو کنترل دور (اینورتر) E3 نیز کنترل برداری سادهای برای بهبود عملکرد در اختیار دارد.
با هر درایوی، تنظیم پارامترهای صحیح موتور و پیروی دقیق از فرایند تنظیم اهمیت بالایی دارد. این مساله به خصوص در کار با موتورهای آهنربا دائم و سنکرون رلوکتانس اهمیت بالایی دارد. البته جای نگرانی نیست، ما اینجاییم تا به شما کمک کنیم!
ترمزگیری و انرژی برگشتی در اینورتر
در حالت کارکرد نرمال درایو کنترل دور (اینورتر) و موتور، درایو با دادن انرژی به موتور آن را به چرخش در می آورد تا بار مورد نظر حرکت کند. اما برخی اوقات این انتقال انرژی در جهت عکس اتفاق می افتد، یعنی انرژی به دلایل مختلف از طرف بار به موتور و اینورتر باز می گردد. این عموما زمانی رخ می دهد که بار در حال تخلیه انرژی باشد مثلا یک جرثقیل یا آسانسوری که در اثر سنگینی زیاد بار به پایین حرکت می کند و موتور را به چرخش در می آورد. بازگشت انرژی همچنین زمانی رخ می دهد که بار در حال توقف دارای لختی بالایی باشد، مثلا فن های بزرگ سانتریفیوژی.
البته اگر اصطکاک سیستم قابل توجه باشد یا عوامل دیگری وجود داشته باشند که به فرآیند توقف کمک کنند، مثلا نیروی دمنده جریان هوا برای فن ها، فرآیند ترمزگیری بسیار آسان تر می شود. اما با این حال اگر این انرژی برگشتی دارای مقادیر زیادی باشد، به هر حال این انرژی به اینورتر باز می گردد. در این حالت، از آنجا که اینورتر موتور را مغناطیسه نگه داشته است و در واقع تحریک شده است، به دلیل اینرسی بالا جهت عبور جریان بر عکس می شود و در واقع موتور به یک ژنراتور تبدیل می شود.
در نتیجه، جریان برگشتی وارد لینک DC اینورتر می شود و به خازن های لینک DC می رسد. این جریان، خازن ها را شارژ می کند و با شارژ شدن خازن ها، ولتاژ لینک DC افزایش می یابد. این جریان نمی تواند به شبکه برگردد، چون سر راه خازن ها و شبکه، پل دیودی یکسو کننده وجود دارد که همانطور که از نامس پیداست فقط جریان را در یک سو، یعنی از شبکه به خازن ها منتقل می کند. بنابراین هرچه انرژی برگشتی بالاتر برود، ولتاژ روی خازن ها نیز افزایش می یابد. برای جلوگیری از آسیب رسیدن به خازن ها، درایو کنترل دور این افزایش ولتاژ را تشخیص داده و خروجی خود را قطع می کند. حال دیگر اینورتر،موتور را مغناطیسه نمی کند در نتیجه شار درون موتور از بین می رود و موتور به صورت خلاص به چرخش در می آید بدون اینکه هیچگونه ولتاژی در ترمینال های خود تولید کند. اینورتر با خطای اضافه ولتاژ تریپ می دهد که یکی از نشانه های اصلی وجود انرژی برگشتی از طرف موتور می باشد.
یکی از راه هایی که برای مقابله با این پدیده می توان اتخاذ کرد، انتخاب حالت ترمزی خلاص است. خلاص بدین معنی است که در هنگام توقف، اینورتر، موتور را کاملا رها کند تا موتور به صورت خلاص از حرکت بایستد. این موضوع دو عیب بزگ دارد. اول آن که در بسیاری از کاربردها ما نیاز به کنترل فرایند توقف داریم. عیب دوم آن است که حتی اگر مشکل را در زمان توقف کامل برطرف کنیم، مساله در حالتی که بخواهیم کاهش شتاب دهیم نیز به قوت خود باقی است. فرض کنید بخواهیم سرعت موتور را از 50HZ به 10HZ کاهش دهیم بدون آن که موتور را متوقف کنیم، در این حالت نیز با مقدار زیادی انرژی برگشتی مواجه خواهیم شد. در نتیجه باید فکری اساسی برای انرژی برگشتی به لینک DC بکنیم.
ساده ترین راه حل این مشکل این است که انرژی تولیدی را تلف کنیم! چه چیزی بهتر از یک مقاومت برای اتلاف انرژی؟! ما می توانیم با اتصال یک مقاومت با توان کافی روی لینک DC انرژی برگشتی را به صورت انرژی گرمایی روی مقاومت تلف کنیم تا باعث بالا رفتن ولتاژ در اینورتر نشود. در این حالت درایو کنترل دور باید مجهز به قطعه ای به نام چاپر باشد. چاپر دقیقا یک IGBT است که وظیفه اش تولید موج های انرژی قابل دفع روی مقاومت است. درایو کنترل دور چاپر را کنترل می کند و هر زمان ولتاژ بالا رفت می تواند اقدام به کلیدزنی کند تا انرژی روی مقاومت تلف شود. پس در هنگام خرید اینورتر به این نکته دقت کنید که در صورت نیاز، درایو کنترل دور حتما دارای چاپر داخلی باشد تا بعدها تنها با اضافه کردن یک مقاومت ساده، مشکلات ترمزی خود را حل کنید. شکل زیر یک اینورتر دارای چاپر ترمزی را نمایش می دهد.
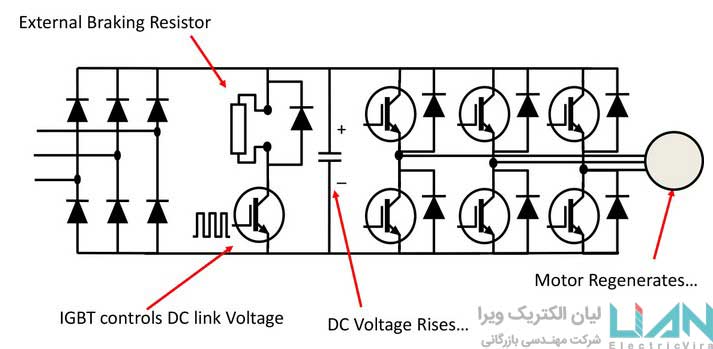
مقاومت ترمزی مورد نظر باید قابلیت کار با ولتاژهای بالای Dcرا داشته باشد و همچنین باید دارای یک مقدار اهم مینیمم باشد که جریان IGBT را محدود کند. علاوه بر آن باید به حفاظت از مقاومت هم توجه کرد. مقاومت ها در هنگام تلف انرژی گرم می شوند در نتیجه باید خارج از تابلو نصب شوند و در برابر مایعات، گرد و غبار و تماس دست محفوظ باشند.
این راه حال تا توان های متوسط حدودد 200kw گزینه خوبی می باشد. اما اگر بخواهیم به جرثقیل کانتینتری فکر کنیم که به طور دائم در حالا بلا و پایین کردن چند صد تن بار است، هم ساختن مقاومت ترمزی مناسب با این کاربرد کار دشواری است، هم انرژی بسیار زیادی تلف می شود که واقعا حیف است! در این موارد بهترین راه حل استفاده از درایوهایی است که قابلیت برگشت انرژی به شبکه را دارند. در این حالت اینورتر باید در ورودی خود نیاز همانند ورودی یک اینورتر کامل داشته باشد که در تصویر زیر مشاهده می کنید.
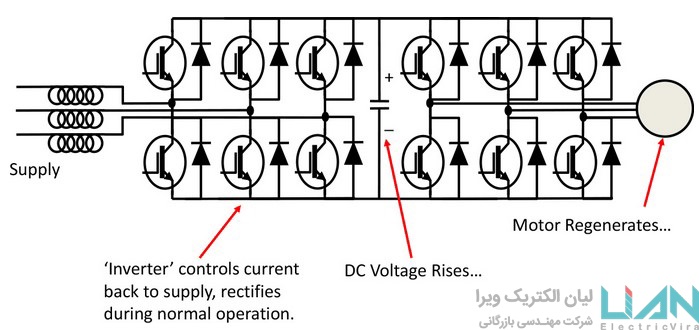
انرژی و توان بر خلاف یکسوساز ها می توانند در هر دو جهت از اینورترها عبور کنند،در نتیجه حالا وقتی انرژی برگشتی از موتور به لینک dc برگشت می تواند به صورت آزادانه از اینورتر ورودی به شبکه بازگردد. دیگر مزیت این نوع اینورتر این است که می تواند هارمونیک ها را به شدت کاهش دهد که در این بازه توانی بالا بسیار مفید و کاربردی است. هزینه های اولیه بالاتری که برای این تجهیز داده می شود خیلی زود با بازگشت انرژی و استفاده از آن یا فروش آن تامین می شود.
یک روش دیگر برای استفاده از انرژی برگشتی نیز این است که لینک DC چندین اینورتر را به یکدیگر متصل کنیم تا زمانی که یک درایو کنترل دور در حال ترمزگیری و بازگشت انرژی است، همان انرژی صرف درایوهای دیگری که در حال چرخاندن موتور خود هستند، بشود. در اینجا یکی از نمونه های برتر درایو کنترل دور لیان الکتریک را به شما معرفی خواهیم کرد.
[call_to_action title=”درایو کنترل دور ABB” icon=”icon-lamp” link=”https://www.lianelectric.com/product/%d8%af%d8%b1%d8%a7%db%8c%d9%88%d9%87%d8%a7%db%8c-%da%a9%d9%86%d8%aa%d8%b1%d9%84-%d8%af%d9%88%d8%b1-abb/” button_title=”” class=”” target=”_blank” animate=””][/call_to_action]
تطابق الکترومغناطیسی و حل مشکل با دستگاه اینورتر
هر هادی که جریان الکتریکی از آن عبور کند در اطراف خود میدان الکترومغناطیس ایجاد می کند، و هر چه فرکانس این موج جریان بالاتر باشد احتمال زیادتری وجود دارد که انرژی از هادی ساطع شود. مهندسان امواج رادیو در گذشته ها از همین ویژگی ها بهره بردند تا سیگنال ها را از طریق خازن و سلف ها ارسال و دریافت کنند. اما با جلوتر رفتن علم مشخص شد امواج الکترومغناطیس ناخواسته ای نیز دائما در تجهیزات در حال ارسال و دریافت است و حتی بردهای ساده مداری نیز گاها سیگنال هایی از خود ساطع می کردند که دستگاه های ابزار دقیق و اندازه گیری را دچار خطا و نویز می کردند.
طبق معمول، مهندسان و تولیدکنندگان به این مساله واکنش نشان دادند و سپس قوانین و دستورالعمل ها نیز به روز شدند. طراحان برای حل این مساله دو رویکرد را اتخاذ کردند. اول، آن ها تلاش کردند تا جلوی نویزهایی که می خواهند وارد تجهیزات آن ها شوند را بگیرند که به این طراحی ایمنی بیشتر در برابر امواج الکترومغناطیس یا EMI اطلاق می گردد. ثانیا، آن ها روی میزان نویزهای الکترومغناطیس تولید شده توسط تجهیزاتشان نیز بهبودهایی ایجاد کردند. یکی از این تجهیزات که به دلیل وجود مدارات کنترلی و تولید فرکانس های متغیر با چالش های بسیاری در زمینه نویز های EMC روبرو بود، اینورترها بودند.
برای دستیابی به این بهبودها، سازندگان فیلترهای EMC درون درایوهای کنترل دور کار گذاشتند. بعدها در عمل مشخص شد که علاوه بر بهبود طراحی، موارد مختلفی در نصب تجهیزات وجود دارد که تاثیر قابل توجهی در عملکرد EMC اینورترها دارد. بسیاری از اینورترها بدون در نظر گرفتن این ملاحظات نیز در صورت داشتن فیلترهای EMC عملکرد کاملا مطلوبی دارند، اما بسته به شرایط توصیه می شود موارد ذیل در نصب رعایت شوند تا از اختلالات عملکردهای کنترلی جلوگیری شود.
شبکه تغذیه درایو و مشکلات آن

اینورتر برای کار کردن نیاز به برق دارد. وقتی از تغذیه برق درایوها صحبت می کنیم، بحث ما چند وات ناقابل نیست، بلکه بحث چندین کیلووات مطرح است. غالب این توان صرف چرخاندن موتور می شود و بخش بسیار کوچکی نیز صرف روشن ماندن مدارات کنترلی اینورتر می گردد.
این را به خاطر داشته باشید، اینورتر یک ترانسفورمر نیست که ولتاژ را دریافت کند و آن را افزایش دهد. بنابارین در غالب برندهای معتبر دنیا اینورتری را پیدا نمی کنید که برق 230 ولت دریافت کند و در خروجی خود یک موتور 400 ولت را بچرخاند! البته همواره استثناهایی وجود دارند و برخی دوستان چینی دست به خلق پدیده های عجیب و غریبی می زنند که چنین کاری را نیز انجام می دهند، اما این رویکرد استاندارد نیست و می تواند مشکلات مختلفی را در پی داشته باشد. در نتیجه عالب درایوهای دنیا می توانند در خروجی خود ولتاژی حداکثر برابر با ولتاژ ورودی ارائه دهند.
موتورهای کوچک تا متوسط معمولا بسته به سربرندی کلاف ها در تخته کلم خود می توانند ولتاژ 230 ولت را با اتصال ستاره و 400 ولت را با اتصال مثلث دریافت و تحمل کنند. در مورد موتورهای بزرگ تر این مقادیر به 400 ولت برای اتصال ستاره و 690 ولت برای اتصال مثلث افزایش می یابد، بنابراین هنگام اتصال حتما پلاک موتور را چک کنید.
برگردیم به اینورترها. اینورترهایی که برق 230VAC را در ورودی خود قبول می کنند نیز وجود دارند. درون درایو این ولتاژ AC توسط پل دیودی در ورودی، به برق DC تبدیل می شود. خلاصه این عملکرد را که قبلا نیز روی آن حسابی بحث کردیم، در شکل زیر مشاهده می کنید.
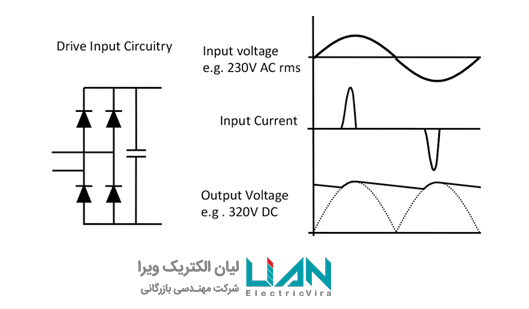
ورودی چه تکفاز باشد چه سه فاز، یک ولتاژ DC برابر با 320VDC روی خازن های لینک DCمی نشیند. مشخص است که این مقدار 320VDC کاملا به مقدار ولتاژ ورودی بستگی دارد و اگر ولتاژ ورودی از 230VAC تغییر کند، مقدار ولتاژ روی لینک Dc نیز متناسب با آن تغییر خواهد کرد.
اکثر درایوها به گونه ای طراحی شده اند که بتوانند عملکرد استاندارد خود را در بازه ای از ولتاژ ورودی ارائه دهند. درایوهای ورودی 230vac، می توانند ولتاژ های 200-240vac را با حد تولرانس +/- 10% بپذیرند. البته همیشه توصیه می کنیم مقدار ولتاژ نامی تان را بین 200-240vac نگه دارید و آن 10% تولرانس را بگذارید برای نوسان های احتمالی شبکه. اگر ولتاژ خیلی بالا برود، درایو با خطای اضافه ولتاژ تریپ می دهد و اگر از تحمل درایو خارج شود، باعث آسیب رسیدن به اجزای داخلی آن خواهد شد. این همان مساله ای است که در مقالات قبلی نیز به آن پرداختیم که هنوز نیز زیاد اتفاق می افتد که برخی افراد درایو با ولتاژ نامی 230vac را به برق 400vac متصل کنند و در همان لحظه مجبور شوند درایو را برای تعمیرات اساسی بازگردانند!
درایوهای 400vac نیز معمولا بازه ولتاژی 380-480vac را می پذیرند و دارای یک حد تولرانس +/- 10% نیز روی این بازه هستند. در این درایوها تعادل ولتاژ ورودی اهمیت بسیار زیادی دارد و نباید بیش از 3% عدم تعاول ولتاژ وجود داشته باشد. یادتان باشد پل های ورودی درایو، ولتاژ ورودی را تنها در لحظه رسیدن به پیک برش می زنند و در همان لحظات جریان کشی می کنند، بنابراین کمی عدم تعادل در ولتاژ منجر به مقدار زیادی نوسان در موج های جریان خواهد شد.
شبکه های قدرت همواره وضعیت ایده آلی ندارند و ممکن است دچار سرج (موج الکتریکی)، افت ولتاژ و صاعقه شوند. اینورترها تا حدودی در برابر سرج و افت ولتاژ مقاومند و می توانند آن ها را تحمل کنند، اما اگر شوک های وارده بسیار شدید باشند، مثلا برخورد یک صاعقه، نمی توان انتظار داشت اینورتر سالم بماند. اگر شبکه تغذیه شما چنین وضعیتی دارد، بهتر است از راه های پیشگیرانه همچون سرج ارسترها برای جلوگیری از موج های کلیدزنی و صاعقه و همچنین چوک ها که جلوی شوک های ولتاژی را می گیرند، استفاده کنید.
در مورد تغذیه این نکته را نیز باید بگوییم که برخی مدل های درایوهای سه فاز با برق تکفاز نیز کار می کنند، که این مساله را در رابطه با هر مدل باید با تامین کننده تجهیز چک کنید.
به وضعیت شبکه ایران هم فکر کنید تا در جایی که می خواهید درایو را نصب کنید در آینده به مشکل بر نخورید. شبکه ایران عموما سه فاز 400 ولت است و در مناطقی نیز که کاربردها خاص تر هستند برق 690 ولت داریم. در مورد 690 ولت مشکل چندانی نداریم چون معمولا از ترانسفورمرهای اختصاصی تغذیه می شوند و برق مناسبی در اختیار است. اما در کاربردهای رایج 400 ولت چندین نکته را در نظر بگیرید. در مناطق صنعتی در هنگام کم باری ممکن است شبکه دچار اضافه ولتاژهای شدید شود. از سوی دیگر در مناطق دوردست از خطوط شبکه، عموما با افت ولتاژ های عجیب و غریب روبروییم. این مساله بیش از همه جا در بحث آبرسانی و پمپاژ برای روستاها و شهرهای کوچک مشهود است. استفاده از یک ترانس تقویتی می تواند این مشکل را برطرف کند.
اینورتر CCFL چیست؟
پس از آشنایی با ساختمان، طرز کار و کاربرد اینورترها در وسایل و تجهیزات مختلف، در این بخش قصد داریم که یکی دیگر از انواع معکوس کننده را به شما معرفی نماییم. این مسئله از این جهت اهمیت دارد که همانطور که در نوشته “تعمیرات اینورتر برای ۳ نوع متداول آن” بیان گردید، علاوه بر آنکه با شناخت انواع مختلف یک محصول می توانیم بالاترین بازدهی را از آن بهره برداری کنیم، در صورت نیاز به تعمیر نیز، آشنایی با گونه های مختلف آن محصول، در انتخاب روش تعمیرات حائز اهمیت است.
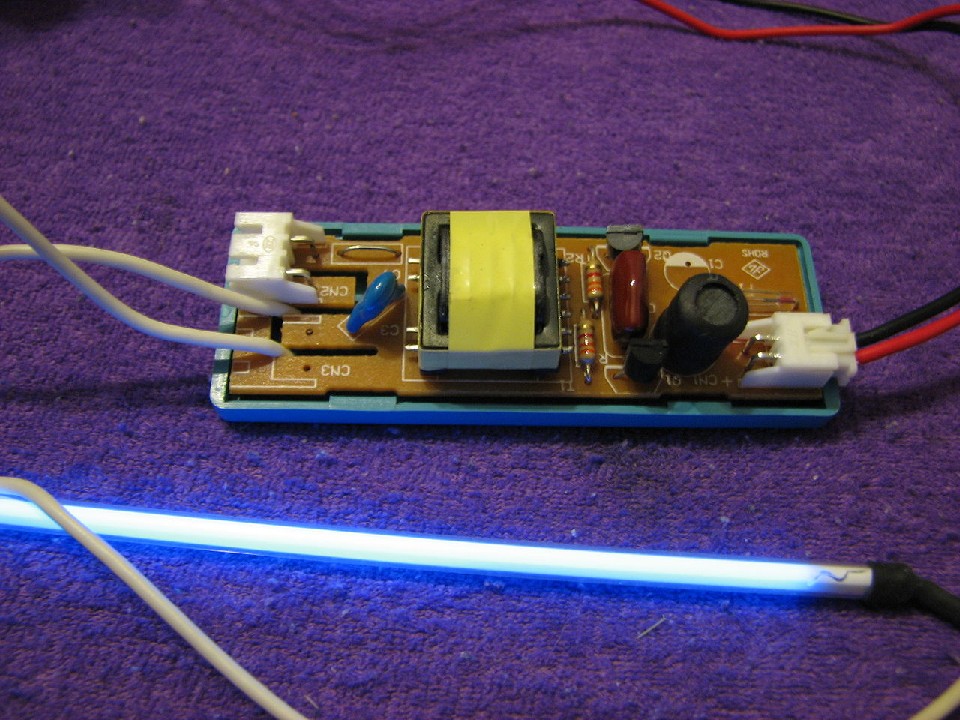
اما اینورتر CCFL یک معکوس کننده الکتریکی است که جریان متناوب (AC) را برای لامپ های فلورسنت کاتدی سرد تامین می کند. در واقع CCFL مخفف (cold cathode fluorescent lamp) می باشد. این لامپ های فلورسنت معمولا به عنوان لامپ های ارزان قیمت در تجهیزات و وسایل برقی به کار می روند که برق آن ها توسط منابع جریان مستقیم مانند باتری ها تامین می شود. اما از جمله دلایلی که باعث گسترش کاردبر یک محصول می شود امتیازات و فواید آن است.
 از مزیت های اینورتر CCFL می توان به موارد زیر اشاره کرد:
از مزیت های اینورتر CCFL می توان به موارد زیر اشاره کرد:
- کوچک هستند و فضای زیادی اشغال نمی کنند.
- دارای بازدهی بالای 80 درصد می باشند.
- نور خروجی قابل تنظیم عرضه می کنند.
کاربردهای اینورتر CCFL
با توجه به کوچکی و بازدهی بالا و همچنین قیمت مناسب، این نوع از معکوس کننده ها کاربرد و کارآیی بسیار زیادی دارند. در اینجا به دو مورد از کاربری های آن اشاره می کنیم؛
- استفاده به عنوان پس زمینه برای ال سی دی ها (LCDs)
- برای نورپردازی و روشنایی در عقب علائم تبلیغاتی
برای آنکه بتوانید با تاریخچه، ساختمان و دیگر کاربردهای این محصول آشنا شوید می توانید به مقاله “مدار اینورتر برای لامپ تخلیه” از اوشیجیما مازاکسو (Ushijima Masakazu) مراجعه نمایید.
معرفی اینورتر ولتاژ پایین AC اشنایدر
درایو آلتیوار پروسس (Altivar Process) اشنایدر نسل بعدی درایوهای سرعت متغیر است و به این منظور طراحی شده است که برای دستگاه ها و سیستم های کاربردی در زمینه آب و فاضلاب، معدن و فلزات، نفت و گاز، غذا و نوشیدنی ها، زیردریایی ها و بالابرها بتواند به خوبی فعالیت کند. البته برای آشنایی با یکی دیگر از اینورترهای اشنایدر که دارای کاربردی متنوع است می توانید به صفحه “درایوهای کاربری عمومی اشنایدر ATV12, 61, 71″ مراجعه نمایید.[call_to_action title=”” icon=”icon-lamp” link=”https://www.lianelectric.com/product/%d8%af%d8%b1%d8%a7%db%8c%d9%88%d9%87%d8%a7%db%8c-%da%a9%d8%a7%d8%b1%d8%a8%d8%b1%db%8c-%d8%b9%d9%85%d9%88%d9%85%db%8c-%d8%a7%d8%b4%d9%86%d8%a7%db%8c%d8%af%d8%b1/” button_title=”درایوهای کاربری عمومی اشنایدر” class=”” target=”_blank” animate=””][/call_to_action]
این نوع از اینورتر دستگاهی هوشمند است که به گونه ای طراحی و ساخته شده است که بتواند داده ها و اطلاعات را جمع آوری کرده و آن را با کاربران به اشتراک بگذارد. به این ترتیب درایو آلتیوار پروسس می تواند باعث بهبود و ترقی بازدهی و راندمان سیستم ها گردد. و علاوه بر آن سبب می شود که هزینه های تحمیل شده به مالکان پروژه ها کاهش یابد.

انواع اینور آلتیوار پروسس:
- آلتیوار پروسس ATV600 که برای پمپ ها، فن ها و کمپرسورها تا 2600 کیلووات استفاده می شوند. دلیل استفاده از این نوع اینورتر در این کاربردها آن است که سیستم ها، اتصالات و تابع های کاربردی در آن تعبیه شده که مختص به مدیریت سیالات است و برای وسایل ذکر شده در کاربردهای صنعتی مناسب است.
- آلتیوار پروسس ATV900 که در آن سرویس ها، کنترل موتور با عملکرد بالا، ایمنی و تابع عملکردی تعبیه شده است که بتواند کاربردهای مورد انتظار را برآورده سازد. کاربردهایی مانند نوار نقاله، جرثقیل، آسیاب و غیره در کاربردهای صنعتی. این نوع اینورتر برای استفاده در بخش هایی مانند معدن و فلزات، نفت و گاز، غذا و نوشیدنی و غیره در کاربری های از 0.75 کیلووات تا 2600 کیلووات مناسب است.
مشاوران و متخصصان لیان الکتریک در رابطه با اینورترهای اشنایدر و همچنین تعمیرات اینورتر می توانند راهنمایی های بیشتری به شما ارائه دهند.
سوالات متداول در مورد اینورتر
1. وظیفه اینورتر چیست؟
دریافت ولتاژ سینوسی شبکه با فرکانس 50 هرتز و تبدیل آن به موج سینوسی با فرکانس دلخواه در خروجی است.
2. چگونه اینورتر را عیب یابی می کنید؟
چگونه اینورتر برق را تعمیر کنیم
عیب یابی سوئیچ برق. وقتی یک اینورتر قدرت بعد از فشار دادن کلید برق روشن نمی شود ، ممکن است مشکل این سوئیچ باشد! …
اتصالات باتری را بررسی کنید…
باتری معیوب را عوض کنبد…
قطعات را سفارش داده و جایگزین کنید…
اینورتر را تست کنید…
3. چرا اینورتر من خاموش است؟
این مورد بیشتر مربوط به سطح ولتاژ خروجی اینورتر است. هنگامی که ولتاژ خیلی زیاد شود، اینورتر به دلایل ایمنی خاموش می شود.
4. چگونه می دانید اینورتر کار نمی کند؟
روشن نشدن اینورتر یکی از رایج ترین مشکلات اینورتر است. … در صورت وجود باتری معیوب ، آن را تعویض کنید اما اگر اینورتر از کار افتد، برای تنظیم مجدد نیاز به فشار دکمه تنظیم مجدد داده شده، بر روی دستگاه است. اگر باتری شما ضعیف شده است ، توصیه می شود آن را برای چند ساعت شارژ کنید.
5. لازمه تبدیل فرکانس در اینورتر چه ماژول های هستند؟
پل یکسو ساز در ورودی، لینک DC در قسمت میانی و ماژول اینورتر IGBT در خروجی.
6. آیا WiFi روی اینورتر کار می کند؟
دستگاه دارای یک باتری کوچک است که می تواند تا 4 ساعت پشتیبانی کند. با این حال ، زمان وعده داده شده 4 ساعت و زمان عملی بسیار کمتر می باشد. باتری نیز بیشتر مواقع کار نمی کند. اگر این جعبه به اینورتر شما وصل نشده باشد، وای فای شما کار نخواهد کرد.
7. چگونه اینورتر را مجددا تنظیم کنید؟
اینورتر خود را خاموش و دوباره راه اندازی کنید
مرحله 1 – AC خاموش. جدا کننده AC را خاموش کنید
مرحله 2 -DC خاموش. جدا کننده DC را که باید در زیر اینورتر قرار داشته باشد خاموش کنید
مرحله 3 -DC را روشن کنید.
مرحله 4 – AC را روشن کنید.
8. مهم ترین تفاوت اینورتر و راه انداز نرم چیست؟
اینورتر در کل دوره بهره برداری از موتور در مدار باقی می ماند اما راه انداز نرم پس از به پایان رسیدن مرحله راه اندازی از مدار خارج می شوند.
9. چرا در اینورتر از لاین فیلتر استفاده میشود؟
برای جلوگیری از ایجاد هارمونیک در شبکه و تاثیر منفی در عملکرد سایر تجهیزات که یکسو کننده های دیودی موجب میشوند.
10. اینورتر چیست؟
اینورتر یک تجهیز الکترونیک قدرت است که به واسطه آن می توان سرعت موتورهای الکتریکی AC را کنترل کرد.
دانلود فایل متن اینورتر
برای دانلود فایل pdf اینورتر از طریق لینک زیر اقدام نمائید.اگر فکر می کنید نیاز هست به مباحث جدید یپردازیم، لطفا در کامنت اعلام کنید تا اقدام شود.
[button link=”https://www.lianelectric.com/wp-content/uploads/2019/11/اینورتر-چیست؟.pdf” type=”icon” newwindow=”yes”] اینورتر چیست!؟[/button]
[/vc_column_text][/vc_column][/vc_row]

{kind=link}
بدون دیدگاه