

موتورها و روش های راه اندازی مختلف | ویژگی سافت استارتر
موتور الکتریکی
موتورهای الکتریکی انواع مختلفی دارند: موتورهای تکفاز، موتورهای سه فاز، موتورهای ترمزی، موتورهای سنکرون، موتورهای آسنکرون، موتورهای سفارشیساز، موتورهای دوسرعته، موتورهای سه سرعته و بسیاری انواع دیگر که هر کدام دارای عملکرد و مشخصات مخصوص خود هستند.برای آشنایی بیشتر با سافت استارتر لینک زیر را دنبال کنید:
موتورها روشهای خنکسازی مختلفی دارند، از موتورهای بدون فن گرفته تا موتورهایی با خنکسازی ترکیبی آب و هوا. برای این که خیالمان از طول عمر بالای موتور راحت باشد، باید آن را در شرایط حفاظت محیطی مناسبش نگهداری کنیم، به خصوص اگر موتور بار سنگینی داشته باشد. IP که به مفهوم درجه حفاظت محیطی (International Protection) است به همراه دو رقم عددی در کنارش نمایش داده می شود. رقم اول بیانگر تحمل و پایداری تجهیز در برابر نفوذ و برخود اجسام جامد و گرد و غبار بوده و رقم دوم نیز بیانگر درجه حفاظتی در برابر آب است. برای مثال، یک تجهیز یا موتور IP66 در برابر نفوذ گرد و غبار و شست و شو با آب کاملا مقاوم است،در حالی که IP20 به این معنی است که تجهیز تا حدودی در برابر گرد و غبار مقاومت دارد اما حتی در برابر قطرات کم آب یا رطوبت شدید نیز آسیبپذیر است.
تصویر واضح یک موتور را در شکل زیر میبینید:
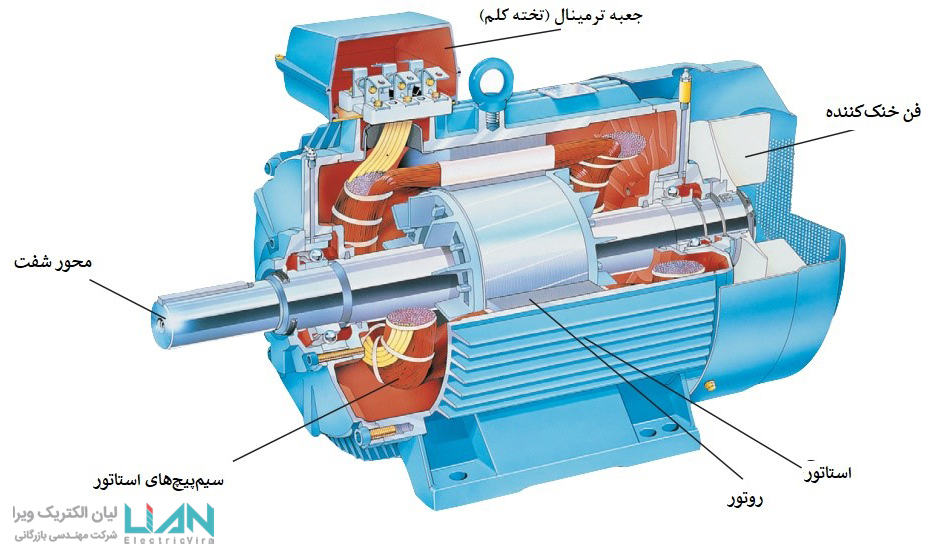
موتورهای قفسسنجابی
تمرکز ما در بحث موتورها و همچنین تجهیزات کنترل موتور همچون سافت استارتر و درایو یا اینورتر، غالبا روی موتور قفسسنجابی (موتور القایی رایج بازار) است. این موتورها نسبتا ارزان بوده و هزینه تعمیر و نگهداریشان معمولا پایین است. سازندههای مختلفی در سراسر جهان و ایران به ساخت چنین موتوری میپردازند و قیمتهای متنوع و رقابتی برای آن در بازار موجود است. البته کیفیت و عملکرد همه موتورها یکسان نیست. موتورهای سازندههایی همچون siemens، ABB و SEW عموما از کیفیت بالایی برخوردار هستند و اصطلاحا جواب خود را در صنایع مختلف پس دادهاند.
بالا بودن بازدهی یک موتور باعث می شود موتور در حالت کاری نامی اش صرفهجویی قابل توجهی در هزینه مصرف انرژی داشته باشد. از سوی دیگر کم بودن میزان تولید صدا و نویز و قابلیت کارکرد در شرایط دشوار محیطی از جمله مزایای موتورهای پیشرفته امروزی است.
البته پارامترهای دیگری نیز وجود دارند که موجب تمایز بین موتورها میشوند. طراحی روتور روی جریان و گشتاور راهاندازی موثر است و گاها موتورهای برندهای مختلف تفاوت قابل توجهی در این زمینه باهم دارند. به خصوص در هنگام استفاده از سافتاستارترها انتخاب موتورهایی با گشتاور راهاندازی بالا خیلی موثر است. اگر موتوری داشته باشیم که گشتاور راهاندازی بالایی داشته باشد، با استفاده از ویژگی سافت استارتر مناسب میتوانیم جریان راهاندازی را بسیار بیشتر کاهش دهیم، نسبت به حالتی که یک موتور با گشتاور راه اندازی پایینتر در اختیار داشته باشیم.
علاوه بر این موارد، تعداد قطبها نیز روی مشخصات فنی تاثیرگذار است. موتورهایی با دو قطب عموما گشتاور راهاندازی پایینتری نسبت به موتورهایی با تعداد قطب بالاتر دارند.
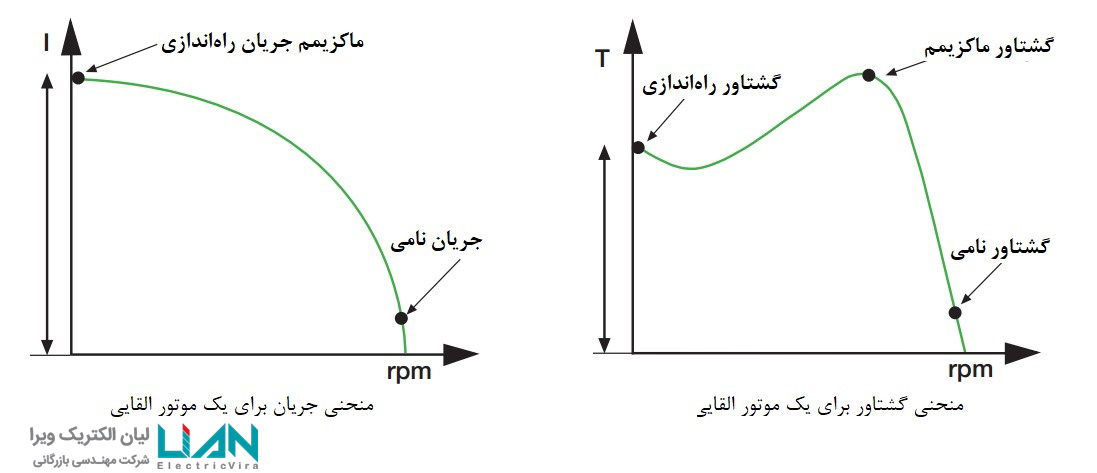
در شکلهای زیر نمودارهای جریان راهاندازی و گشتاور راهاندازی یک موتور القایی فرضی نسبت به سرعت را مشاهده میکنید. همانطور که میبینید، جریان یک موتور در لحظه شروع استارت موتور بیشترین مقدار خود را دارد. این جریان معمولا بین 4 تا 6 برابر جریان نامی روی پلاک موتور است. با سرعت گرفتن موتور این جریان کاهش مییابد و با رسیدن موتور به سرعت نامی، جریان موتور نیز روی حالت نامی خود قرار میگیرد و موتور تا استارت بعدی در حالت نرمال و پایدار خود به کار ادامه میدهد. این تغییرات ناگهانی در زمان راه اندازی برای گشتاور موتور نیز اتفاق میافتند. در لحظه استارت، گشتاور بالاتر از گشتاور نامی موتور است و با سرعت گرفتن موتور ابتدا گشتاور افزایش مییابد تا به قله گشتاور (گشتاور ماکزیمم) میرسد و با رسیدن به سرعت نامی، گشتاور موتور نیز روی حالت نامی خود قرار میگیرد.
ولتاژ
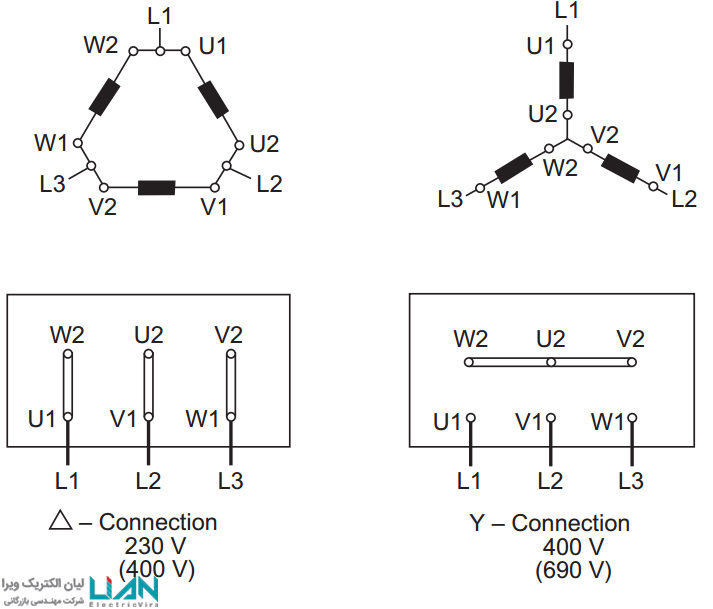
موتورهای القایی سهفاز تکسرعته را معمولا میتوان با دو نوع اتصال مختلف با سطح ولتاژهای مختلف تغذیه کرد. کلافهای استاتور (که در ترمینال موتور یا تخته کِلَم قرار گرفته اند) را میتوان به دو شکل ستاره Y یا مثلث D سربندی کرد.
اگر روی پلاک موتور برای این دو اتصال دو ولتاژ مختلف ذکر شده باشد، به این معنی است که میتوانید مثلا موتور را با انتخاب سربندی مناسب با ولتاژ 400 ولت یا 230 ولت بهرهبرداری کنید. به صورت یک قانون عمومی معمولا ولتاژ بزرگتر ذکر شده مربوط به اتصال ستاره و ولتاژ کوچکتر مربوط به اتصال مثلث است. بنابراین در مورد مثالی که زدیم، برای تغذیه موتور با ولتاژ 400 ولت باید موتور را به صورت ستاره سربندی کنیم و برای تغذیه به صورت 230 ولت باید کلافهای موتور را به صورت مثلث سربندی کنیم.
در زمان انتخاب سربندی مناسب دقت کنید که در مورد یک موتور یکسان با انتخاب ولتاژ پایین تر، جریان کاری موتور بیشتر خواهد بود و در همان موتور با ولتاژ بالاتر، جریانی که موتور میکشد پایینتر است.
نحوه اتصال موتور به صورت ستاره و مثلث در شکل زیر به نمایش در آمده است:
ضریب توان
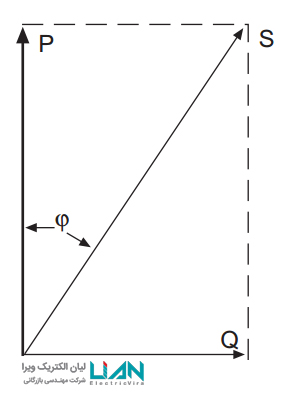
یک موتور توان اکتیو مصرف میکند که صرف انجام کار مکانیکی در خروجیاش می شود. از سوی دیگر، موتورها جریان راکتیو نیز مصرف میکنند که صرف انجام هیچ کار خروجی مفیدی نمیشوند، بلکه برای مغناطیسه شدن موتور مورد نیاز است. در شکل زیر میتوانید توانهای اکتیو و راکتیو را که به صورت P و Q نمایش داده شده اند مشاهده کنید. برآیند توانهای اکتیو و راکتیو را نیز توان ظاهری مینامیم و با S نشان می دهیم.
در واقع این تنها توان اکتیو است که برای ما کار میکند. مثلا اگر یک پمپ داشته باشیم که به روتور یک موتور کوپل شده باشد، این جریان اکتیو است که در نهایت تبدیل به نیروی مکانیکی می شود که روتور و پمپ را میچرخاند و برای ما کار مفید انجام میدهد. اما موتور برای این که بتواند به درستی کار کند، نیازمند مقداری انرژی برای مغناطیسه کردن هسته و ایجاد میدان الکترومغناطیسی است. این انرژی از جریان راکتیو تامین می شود که ماهیت متفاوتی نسبت به توان اکتیو دارد.
نسبت بین توان اکتیو P(kW) و توان ظاهری S(kVA) ضریب توان نام دارد و معمولا با cos phi نمایش داده می شود. مقدار این ضریب معمولا بین 0.7 تا 0.9 است. موتورهای کوچکتر ضریب توان کمتری دارند و موتورهای بزرگتر نیز معمولا ضریب توان بالاتری دارند.
موتورهایی پر بازده با کاربردهایی گسترده
امروزه موتورهای الکتریکی یکی از مهمترین ابزارهای کارخانجات تولیدی و صـنایع مختلـف، حمل و نقل، سیستمهای تهویه هوا و کامپیوترها هستند که 43% تا 46% از کـل انـرژی الکتریکـی تولیدی دنیا را مصرف میکنند. موتورهای الکتریکی در حال حاضر سالیانه در حدود 10000 تریلیون وات-ساعت انرژی مصرف میکنند کـه باعث انتشار میزان قابل توجهی گاز CO2 میشود. بنابراین، بسیاریهای از کشورها سیاستهایی اتخاذ نمودهاند که مصرف کنندگان را ملزم میکند از موتورهـایی پـر بـازده چـون موتورهای آهنربا دائم بدون جاروبک (BLDC) در صنایع مختلف و حمل ونقل به طور گسـترده استفاده نمایند.

موتورهای BLDC به صورت گسترده در صنایع هوایی، صنایع فضایی، صنایع دریایی، صنایع فولاد، لوازم خانگی، لوازم کامپیوتری به کار میروند و به دلیل ویژگی های منحصر به فردشان میتوانند جایگزین انواع موتورهای الکتریکی در کارخانجات صنعتی شوند.
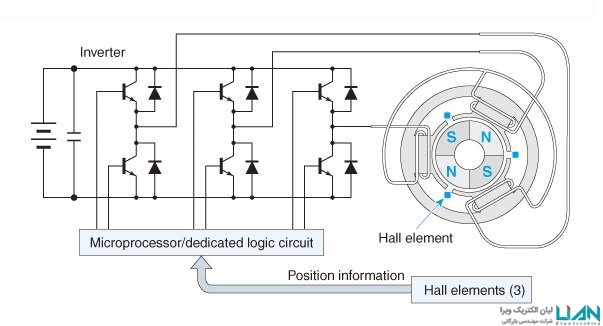
موتورهای BLDC نوعی از موتورهای سنکرون هستند و میـدان مغناطیسـی هـم فرکـانس در روتور و استاتور وجود دارد. این موتورها در انواع تکفاز، دو فاز و سه فاز وجود دارند. نوع سه فاز این موتورها بیشترین رواج و مصرف را در بین انـواع دیگر دارند. این نوع موتورها غالبا متشکل از استاتوری با سیم پیچ سه فاز و روتور آهنربا دائم است که کموتاسیون توسط درایو با فیدبکی که از حسگرهای اثر هال دریافت میشود، انجام میپذیرد. در نتیجه در مقایسه با موتورهای جریان مستقیم سنتی کموتاتور مکانیکی ندارد و آهنرباهای روی روتور میدان مغناطیسی ثابت و کافی را جهت دستیابی به توان و بازده زیاد فراهم می کنند.
از آنجایی که در موتورهای BLDC آهنربا جایگزین سیمپیچ روتور است؛ ضمن بهبود کیفی موتور، با حذف جاروبک معایب جاروبک نیز حذف شده است. به علاوه با استفاده از فیدبک موقعیت روتور، قابلیت کنترل دقیق در این موتور به وجود میآید که مزایای آن را دو چندان میکند. در مقالات بعد به این مزایا اشاره خواهد شد.
همانگونه که گفته شد این موتورها نیاز به یک درایو دارند که با توجه با موقعیت روتور، ولتاژ ورودی را به سیم پیچ ها اعمال نماید که امکان کنترل سرعت برای کاربر فراهم شود. ساختار این درایوها به صورت شکل زیر است. در مورد این ساختار در مقالات بعد توضیحاتی داده خواهد شد.
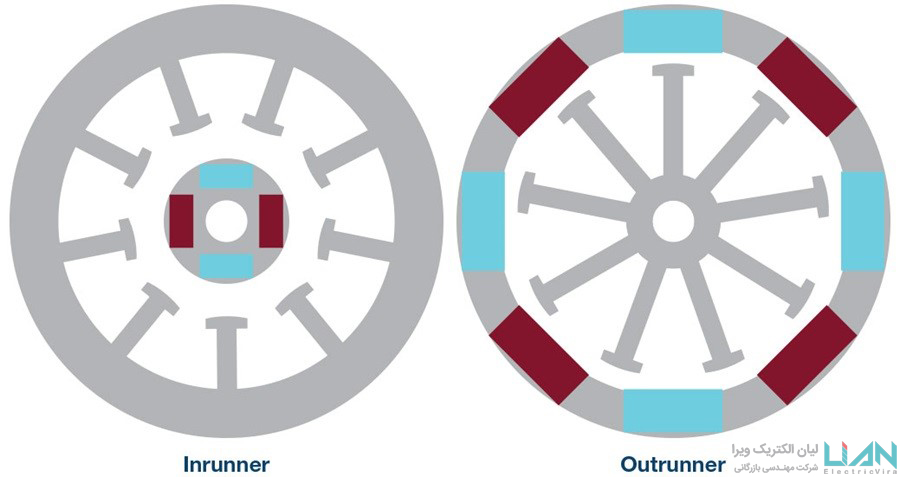
رنج ولتاژ این موتورها میتواند از 12 ولت شروع شود و تا 300 ولت و حتی بالاتر ادامه پیدا کند. توان آنها نیز بازه گستردهای دارد. این موتورها میتوانند به صورت روتور داخلی یا روتور بیرونی باشند که با توجه به کاربرد آنها هر کدام از موارد قابل انتخاب است.
مزایا و معایب موتور BLDC
مزایا:
1. عدم استفاده از جاروبک برای کموتاسیون
استهلاک جاروبک ها در حین استفاده از موتور تعمیر و نگهداری را ضروری میسازد و با حذف آنها در موتور BLDC نیازی به بازبینی، نگهداری و صرف هزینه نیست. از طرف دیگر، به دلیل عدم وجود تلفات ناشی از جاروبکها نه تنها بازده افزایش مییابد بلکه امکان دستیابی به سرعتهای بیش از 100000rpm نیز فراهم میشود. باید خاطر نشان کرد که عامل اصلی که باعث میشود نتوان سرعت موتورهای DC را افزایش داد وجود جاروبک در این موتورها است. وجود جاروبک باعث تولید امواج و تداخل فرکانس رادیویی میشود که در موتور BLDC این مشکل وجود نداشته و قابلیت استفاده در صنایع حساس چون صنایع هوایی و هوافضا را دارد.
2. استفاده از آهنربای دائم به جای سیم پیچی روتور
با حذف سیم پیچ از روتور تلفات مسی سیم پیچ روتـور دیگـر وجـود نـدارد درنتیجـه بـازده افزایش مییابد. در این حالت چون دیگر نیازی به انتقال حرارت سیم پیچ روتور به خـارج نیسـت و فقط سیم پیچ استاتور وجود دارد می توان حجم را کاهش داد درنتیجه چگالی گشـتاور در ایـن نـوع موتور از بقیه موتورها بیشتر است. استفاده از آهنربا بـه جـای سـیم پـیچ باعـث کـاهش وزن روتـور میشود و با کاهش اینرسی روتور، کنترل پذیری موتور بیشتر خواهد شد.
3. استفاده از فیدبک موقعیت محور به منظور کنترل
این طراحی سبب ایجاد مشخصه گشتاور سـرعت خطـی شـده کـه امکـان کنتـرل آسـانتر در محدوده وسیع سرعت و گشتاور را فراهم میآورد، از طرفی امکان دستیابی به گشتاورهای زیـاد چـه در لحظه راه اندازی و سرعت های کم و چه در سرعت های زیاد را ممکن میسازد.
معایب:
باید توجه داشت که در کنار مزایای بالا، این موتورها معایبی هم دارد. اولین اشکال موتورهای BLDC قیمـت آنهاسـت. با اینکه وجود آهنربای دائم در موتور سب افزایش قیمت موتور نسبت به سایر موتورهـا میشـود، در اغلب مواقع این قیمت بیشتر برای موتورهای BLDC به علت نیاز به درایو الکترونیکـی اسـت. بـرای کاربردهای تک سرعت، احتمال دارد این هزینه افزایش قیمت با وجود مزیتهـای دیگـر ایـن موتـور توجیهپذیر نباشد. درحالیکه اگر در کاربریهایی نیاز به سرعت متغیر و یا کنترل موقعیت است (که در هر صورت نیاز به مدارات الکترونیکی احساس میشود) آنگاه موتورهای BLDC علاوه بر اینکه مزایای فوق را دارند نسبت به سـایر موتورها چندان هم گران نیستند.
در جدول زیر مقایسه ای بین موتورهای القایی، DC جاروبـک دار و BLDC آورده شده است:
|
معیار |
موتور DC | موتور القایی |
موتور BLDC |
|
کموتاسیون |
توسط جاروبک و کموتاتور | — |
بهصورت الکترونیکی |
|
نگهداری |
نیاز به تعمیرات دورهای به دلیل وجود جاروبک | نگهداری کم |
نگهداری کم |
|
عمر |
کوتاه | طولانی |
طولانی |
|
مشخصههای سرعت گشتاور |
نسبتاً تخت- در سرعت زیاد به علت اصطکاک جاروبک افت گشتاور دارد | غیرخطی- در سرعتهای زیاد گشتاور کمتری تولید میکند |
تخت- قابلیت کار در تمامی سرعتها با بار نامی |
|
اینرسی موتور |
اینرسی زیاد <= پاسخ دینامیکی کم | اینرسی زیاد <= پاسخ دینامیکی ضعیف |
آهنربا در روتور <= پاسخ دینامیکی خوب |
|
محدوده سرعت |
محدوده سرعت کم به دلیل وجود جاروبک | محدوده کمتر نسبت به BLDC |
محدوده سرعت وسیعی دارد |
|
نویز الکتریکی |
به دلیل جرقههای ناشی از کموتاسیون نویز زیادی ایجاد میکند | — |
کم است |
|
هزینه ساخت |
کم | کم |
به دلیل استفاده از آهنربا دائم زیاد است |
|
کنترل |
سرعت ثابت: نیاز ندارد
سرعت متغیر:به کنترلکننده نیاز دارد |
سرعت ثابت: نیاز ندارد
سرعت متغیر: به کنترلکننده نیاز دارد |
همواره به کنترل کننده نیاز دارد |
|
جریان راهاندازی |
به دلیل صفر بودن نیروی ضدمحرکه در راهاندازی، باید کنترل شود | تا 7 برابر جریان نامی است و نیاز به مدار راهانداز دارد |
در حد نامی بوده و نیازی به محدودکننده جریان ندارد |
محفظه در طراحی سافت استارتر می تواند از مواد پلاستیکی، فلزی یا ترکیبی از این مواد ساخته شوند و عملکرد آن محافظت از اجزای داخلی سافت استارترها در برابر آسیب های مکانیکی و الکتریکی وارده می باشد. همچنین برای محافظت از قطعات در برابر گرد و غبار و خاک نیز استفاده می شود. برای محافظت کامل در برابر گرد و غبار و خاک، زمانی که درجه حفاظت محیطی (کلاس IP ) واحد بسیار کم است، استفاده از تابلوبرق نیز توصیه میشود.
روشهای راه اندازی مختلف
تا به اینجا در رابطه با موتورها و ویژگیهای ذاتی شان صحبت کردیم و فهمیدیم یک موتور را میتوان به چه شکلهایی به شبکه برق متصل کرد. اما بحث بعدی راهاندازی موتورهاست. حال میخواهیم ببینیم چه روش هایی برای راهاندازی موتورها وجود دارد. قبل از رفتن سر اصل مطلب، ابتدا بیایید بحث سرعت و گشتاور موتورهای القایی را با جزئیات بیشتری بررسی کنیم.
سرعت
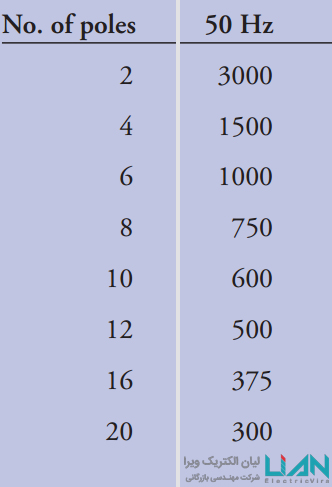
سرعت موتورهای القایی به دو عامل بستگی دارد: تعداد قطب های استاتور و فرکانس شبکه. در شبکه های 50 Hz سرعت چرخش موتور n را میتوان از رابطه زیر به دست آورد:

در این رابطه p تعداد قطبهای استاتور است. برای نمونه برای یک موتور 4 قطب سرعت برابر خواهد بود با:
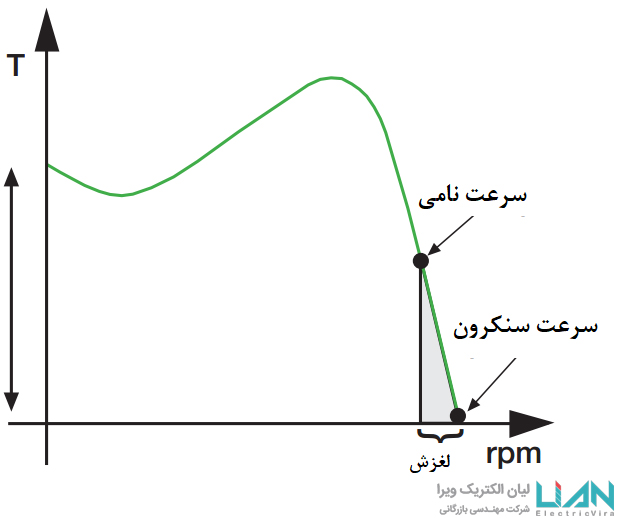
این سرعت سنکرون شبکه است. از آنجا که موتورهای القایی از نوع آسنکرون هستند، هیچ وقت به این سرع تنمیرسند، اما همیشه نزدیک آن حرکت میکنند. زمانی که موتور بی بار باشد سعت آن به سرعت سنکرون بسیار نزدکی است، مثلا 1490rpm، اما با افزایش بار روی موتور سرعت آن نیز کمی افت میکند و ممکن است برای مثال به 1445rpm برسد.
سرعت آسنکرون موتور همان “سرعت نامی” درج شده روی پلاک موتور است و به این اختلاف سرعت بین سنکرون و آسنکرون اصطلاحا “لغزش” میگویند. در نمودار زیر میتوانید مفاهیم سرعتهای نامی و سنکرون و لغزش را روی منحنی سرعت-گشتاور مشاهده کنید.
در جدول زیر نیز میتوانید سرعتهای سنکرون مختلف برای تعداد قطب های مختلف را مشاهده کنید:
روشهای راهاندازی موتور القایی
روش های راهاندازی مختلفی برای موتورهای القایی وجود دارد. چهار نوع از رایجترین روشها عبارتند از:
- راه اندازی مستقیم
- درایو
- راه اندازی ستاره مثلث
- سافت استارتر
تصویری از نمونه تجهیزات مورد استفاده برای هر کدام از روش های مذکور را می توانید در ذیل مشاهده کنید.

روش راه اندازی مستقیم
این روش ابتدایی ترین روش برای راه اندازی موتورها است. تجهیزات استارت تنها شامل یک کنتاکتور و بی متال می شود. مهم ترین عیب این روش این است که جریان راه اندازی بسیار بالایی دارد. این جریان راه اندازی معملا بین 6 تا 7 برابر جریان نامی موتور است اما در مواردی بسته به بار جریان می تواند تا 9 یا 10 برابر جریان نامی نیز بالا برود.
جریان راه اندازی به طراحی و سایز موتور بستگی دارد اما به طور کلی هرچه بار موتور بیشتر باشد جریان راه اندازی نیز بالاتر خواهد بود. نمونه دیاگرام و تجهیزات یک راه اندازی مستقیم را می توانید در شکل زیر مشاهده کنید.
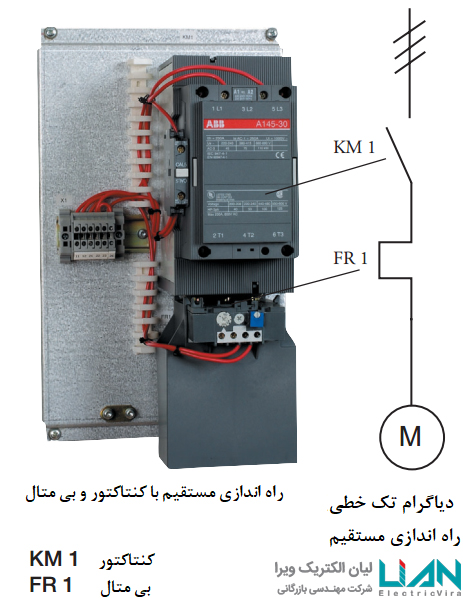
در راه اندازی مستقیم گشتاور راه اندازی بسیار بالاست و بیش از حد مورد نیاز برای اغلب کاربردها است. گشتاور مثل نیرو است و نیروی بیش از حد موجب فشار بیش از حد روی کوپلینگ ها و بار می شود. علاوه بر آن در این روش انعطاف پذیری کنترلی بسیار پایین است و همچنین حفاظت از موتور نیز حفاظت مطمئن به شمار نمی رود. کاربردهای بسیار کمی وجود دارند که این روش بهترین انتخاب برایشان باشد و در نتیجه مهندسان عموما به دنبال روش های پیشرفته تری هستند.
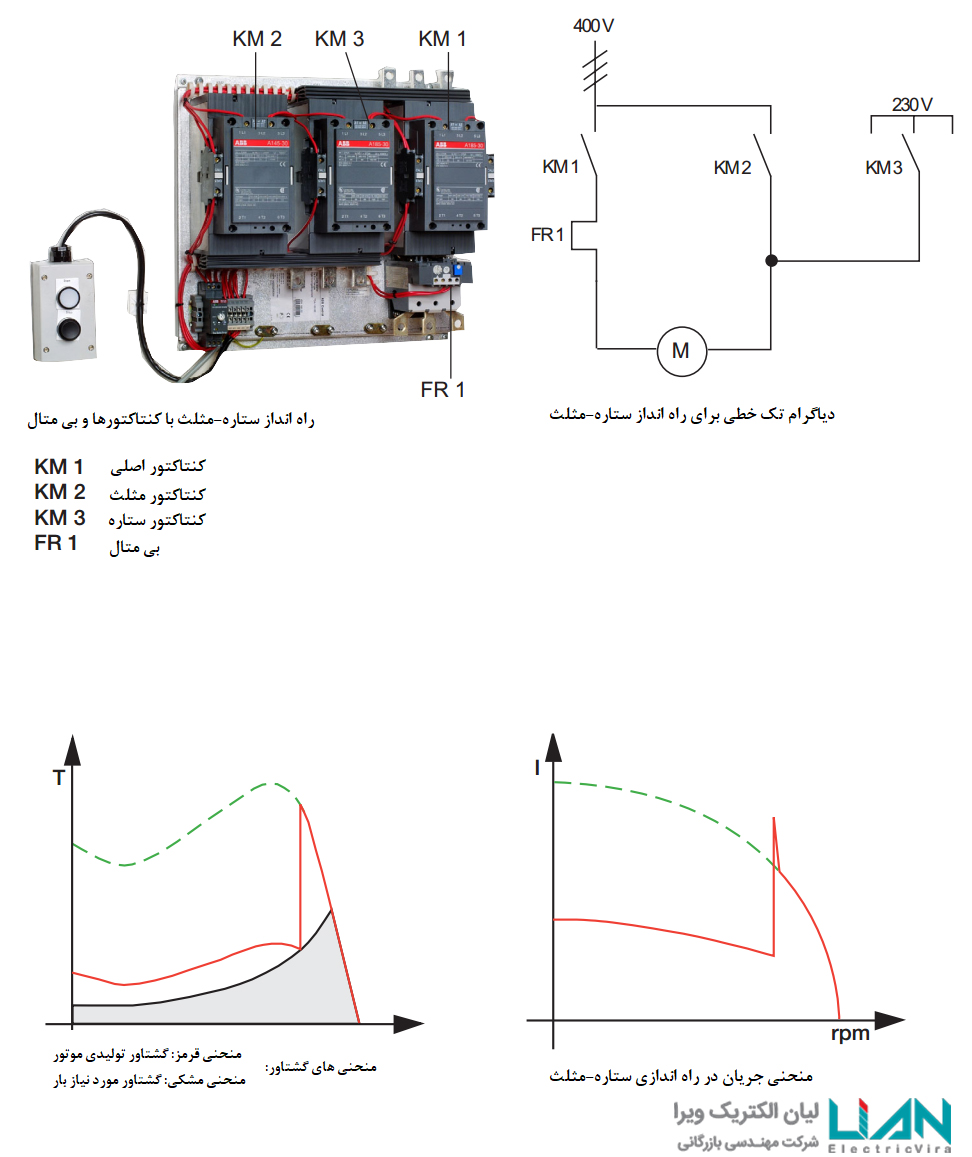
راه اندازی ستاره مثلث
راه اندازی ستاره مثلث جریان و گشتاور راه اندازی را تا حدودی نسبت به راه اندازی مستقیم کاهش می دهد. این راه اندازی عموما دارای سه کنتاکتور، یک بی متال و یک تایمر برای تعیین مدت زمان ماندن در وضعیت ستاره است. برای بهره برداری از موتور در این روش باید اتصال آن در حالت دائم به صورت مثلث باشد.
منطق عملکرد این روش به این صورت است که ابتدا اتصال ترمینال های موتور برای مدت معینی به صورت ستاره بسته می شود. ویژگی اتصال ستاره این است که در این اتصال جریان راه اندازی تا 70% و گشتاور نیز تا 75% نسبت به حالت راه اندازی مستقیم کاهش می یابد. پس از گذشت مدت زمان معین، اتصال موتور به مثلث تغییر می کند تا شرایط کار نرمال ادامه پیدا کند.
این روش راه اندازی تنها زمانی موثر است که موتور بار سنگینی نداشته باشد. اگر موتور تحت بار کامل باشد، نمی تواند به اندازه مورد نیاز گشتاور تولید کند تا سرعت موتور افزایش یابد و اتصال دائمی مثلث برقرار شود. برای مثال زمانی که می خواهیم یک پمپ یا فن را استارت بزنیم، گشتاور مورد نیاز این نوع بارها در ابتدای راه اندازی پایین است و با افزایش سرعت، گشتاور مورد نیاز نیز افزایش می یابد. با رسیدن به 80-85% سرعت نامی، گشتاور بار تقریبا برابر با گشتاور موتور می شود و چون اتصال ستاره گشتاور پایینی تولید می کند، موتور دیگر نمی تواند سرعت بگیرد. با تغییر اتصال به مثلث، موتور می تواند گشتاور مورد نیاز را تولید کند و به سرعت نامی برسد، که البته این تغییر وضعیت با پیک زدن جریان و شوک های مکانیکی همراه خواهد بود. این پیک جریان گاهی می تواند حتی از پیک جریان راه اندازی مستقیم نیز بیشتر باشد.
تجهیزات، دیاگرام تک خطی، و منحنی های های راه اندازی این روش را می توانید در شکل زیر مشاهده کنید.
ویژگی سافت استارتر نسبت به سایر روش های راه اندازی متمایز است. المان الکترونیکی اصلی سافت استارتر تریستورها هستند که وظیفه رگولاسیون ولتاژ اعمالی به موتور را بر عهده دارند. اساس عملکرد و ویژگی سافت استارتر این است که با محدود کردن ولتاژ در زمان راه اندازی، جریان و گشتاور راه اندازی نیز کم می شود.
در لحظات اولیه راه اندازی با سافت استارتر ولتاژ بسیار پایین ات که باعث می شود هیچ شوک مکانیکی اولیه ای به موتور و بار وارد نشود. با گذشت زمان کم کم ولتاژ و گشتاور افزایش پیدا می کنند و در نتیجه موتور شروع به شتاب گرفتن می کند.
یک ویژگی سافت استارتر و استفاده از این روش راه اندازی امکان محدود کردن گشتاور دقیقا روی مقدار مورد نیاز است، چه موتور بی بار باشد چه با بار کامل. در واقع با این روش می توان گشتاور مورد نیاز بار را در اختیار موتور قرار داد بدون این که در لحظه استارت به یراق آلات موتور و بار آسیبی برسد و در نتیجه هزینه های کمتری بابت تعمیر و نگه داری پرداخت خواهیم کرد. از طرف دیگر، این جریان راه اندازی کاهش یافته باعث خواهد شد در طرف تغذیه نیز دچار افت ولتاژ نشویم.
از دیگر ویژگی سافت استارتر قابلیت توقف نرم است که در رابطه با پمپ ها اهمیت دو چندانی می یابد. با این ویژگی می توان جلوی معظلات سیستم های پمپاژ همچون پدیده ضربه قوچ در لوله های آبرسانی را بهبود بخشید یا به طور کامل مرتفع ساخت. از توقف نرم می توان روی تسمه نقاله ها نیز بهره برد که مانع از آسیب رسیدن یا افتادن بار از روی نقاله در اثر توقف ناگهانی می شود.
اینورتر یا درایو تجهیز دیگری است که تاثیر منحصر به فردی در راه اندازی موتورهای القایی دارند. درایو ها از دو بخش تشکیل شده اند که در بخش اول برق AC ورودی را به برق جریان مستقیم DC تبدیل می کنند و سپس در بخش دوم مجددا یک برق AC با فرکانس متغیر را در اختیار موتور قرار می دهند. این تجهیزات به طور کامل در مقاله اینورتر (درایو) چیست مورد بررسی قرار گرفته اند و می توانید جزئیات کاملی از نحوه عملکرد آن ها را در این مقاله بیابید.
گاها در برخی کاربردها از درایو تنها برای راه اندازی موتور استفاده می شود بدون این که در زمان کارکرد نرمال موتور نیازی به تغییر سرعت داشته باشیم. این در حالیست که این تجهیزان هزینه های مالی بیشتری را نسبت به سایر روش های راه اندازی به ما متحمل میکنند. درایو به واسطه نحوه عملکرد منحصر به فردش می تواند گشتاور نامی را از سرعت های پایین در اختیار موتور قرار دهدو از طرف دیگر قابلیت ها توقف نرم و انعطاف پذیری کنترلی بسیار بالایی دارد.
مشکلات رایج در هنگام راه اندازی و توقف موتورها در جدول زیر لیست شده اند و نشان داده شده است که با استفاده از هر روش چه بهبودی در رابطه با مشکل به وجود آمده حاصل خواهد شد.
|
مشکل |
راه اندازی مستقیم |
ستاره-مثلث |
اینورتر |
سافت استارتر |
|
آسیب رسیدن به تسمه های لاستیکی و بلبرینگ ها |
بله |
تا حدودی |
خیر |
خیر |
|
جریان راه اندازی بالا |
بله |
تا حدودی |
خیر |
خیر |
|
اصطهلاک و آسیب دیدن گیربکس ها |
بله | بله (در صورت راه اندازی با بار) | خیر |
خیر |
|
آسیب دیدن محصولات هنگام توقف |
بله | بله | خیر |
خیر |
|
مشکل های آبرسانی ضربه قوچ و کاویتاسیون |
بله | بله | خیر |
خیر |
|
پیک جریان هنگام راه اندازی |
بله | بله | خیر |
خیر |
|
افت ولتاژ تغذیه |
بله | بله | خیر |
افت ولتاژ کم |
|
تعداد کابل های اتصال |
3 | 6 | 3 |
3 |
|
نیاز به تعمیر و نگهداری |
زیاد | زیاد | کم |
بسیار کم |
|
حفاظت کامل از موتور |
خیر | خیر | بله |
بله |

{kind=link}
بدون دیدگاه